Nick Rehm
Nick Rehm-
Optimizing a VTOL
03/29/2023 at 23:41 • 0 commentsAlways happy to help up-and-coming youtubers with their projects!
-
V-22 VTOL Model
03/31/2021 at 02:49 • 0 commentsCheck out this awesome project running dRehmFlight VTOL, by Brian Jones:
This model uses two 450 helicopter rotor kits with full cyclic and collective control, easily programmed for stabilized flight with dRehmFlight's easy to understand control mixing and code modifications. Fingers crossed for successful transition!
-
How the Flight Controller Code Works
02/07/2021 at 16:42 • 0 commentsHere is a pretty long video walking you through the structure of the code, where I point out things that are important to know if you would like to modify the code for your application:
-
IMU Configuration Tutorial Video
01/28/2021 at 15:39 • 0 commentsHere is a quick tutorial on first-time setup of the IMU as well as some tips on mounting for the best performance:
-
Showcasing dRehmFlight's Versatility
11/11/2020 at 02:07 • 0 commentsI wanted to show my process of building a VTOL vehicle and implementing this flight controller to stabilize it in the air. I decided to build the famous SpaceX test vehicle: Starhopper. Modifying the code for this unique hovering platform took less than 2 minutes (skip to 3:12 for code modifications):
You can follow along with my Starship program progress on it's own Hackaday Page.
-
Test Platform + Data Logging
10/25/2020 at 19:03 • 0 commentsHi all,
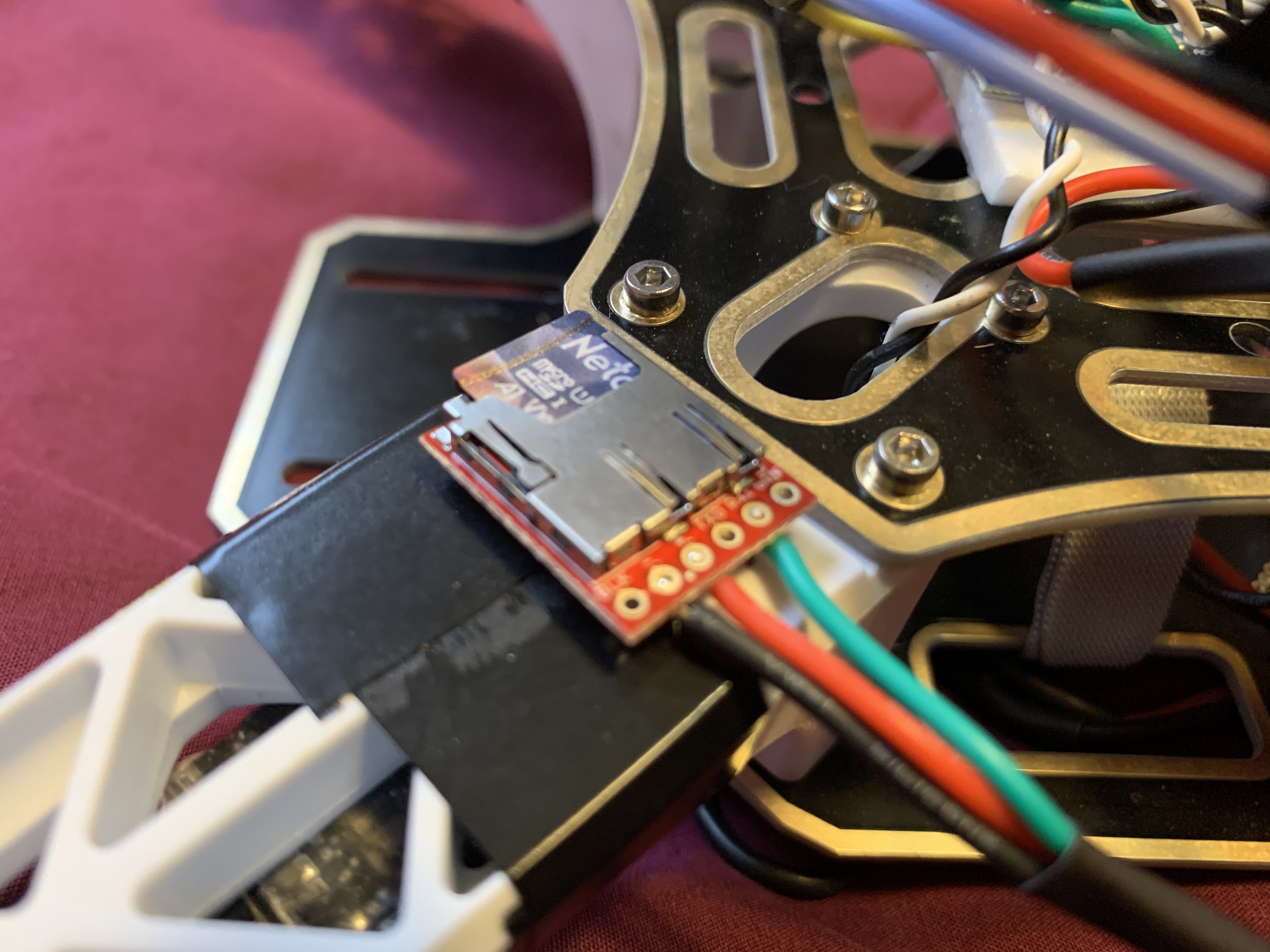
I've been very busy lately, but have managed to get a test quadcopter thrown together to test new features and improve the code:
![]()
I am using the SparkFun OpenLog to print data to a spare serial pin on the Teensy, which is then dumped into an SD card as a .txt file onboard. Super simple!
![]()
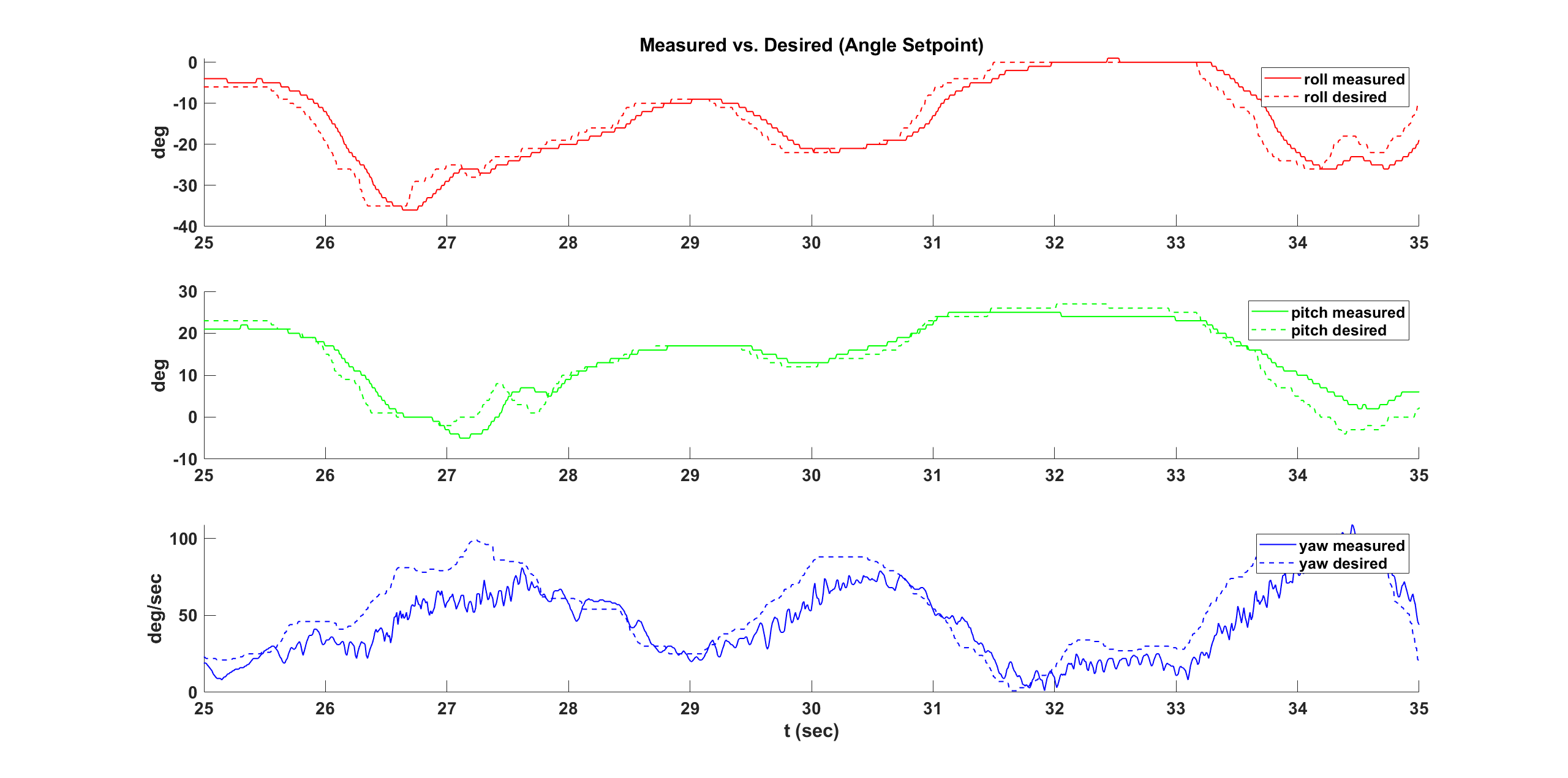
Here is some sample data showing the control response. Overall, I am very happy, but this data is already giving me ideas on how to squeeze out even more performance!
![]()
-
Radio Connection Tutorial Video
10/12/2020 at 15:47 • 0 commentsHere is the next tutorial in my series for dRehmFlight VTOL: Setting up your radio connection. dRehmFlight VTOL currently supports PWM, PPM, and SBUS type receivers of any brand. My goal with these videos is to provide a resource that I wish I had when first starting off. Let me know if this helps you in any way!
-
Beta 1.2 Released!
10/01/2020 at 13:56 • 0 commentsHey Everyone,
I've been working hard on getting 1.2 put together and documented. I had a few setbacks over the past week or so, but now we're here. Some updates:- SBUS receiver support
- MPU9250 support
- New IMU/radio selection: simple defines in beginning of code
- IMU gyro and accelerometer scale selection: up to +/-2000 deg/sec and +/-16 Gs
- Added switchRollYaw() function (see documentation for details)
- Added printServoCommands() function
- Switch between controller types with a logical statement in the main loop
- Minor bug fixes & tidying up
https://github.com/nickrehm/dRehmFlight
I highly recommend you check out the updated documentation. For expedited setup, check out the "General Instructions for First-Time Setup" tutorial at the end of the document to get up and running as fast as possible.
The MPU9250 integration was difficult to say the least, but I think I finally got it working. The MPU9250 requires some special attention when it comes to soldering up with the Teensy as well as adjusting some filtering parameters for it. You'll also have to do some calibration, but that is as simple as uncommenting a function at the end of the void setup() and performing the calibration by rotating the IMU for a minute or so. Check out the "MPU9250 Integration" tutorial for more information on everything to do with the MPU9250. I will still HIGHLY recommend sticking to the MPU6050, as that is the IMU that this code was originally built around.
There were some small bugs that were fixed. You can now seamlessly switch between controller types (angle or rate) in the main loop with a logical statement should you code that in. Also fixed an error/bug with processing the IMU data.
Speaking of the IMU data, I need to thank jihlein on RcGroups for his amazing help overhauling the IMU data gathering (enabling MPU9250 use too). He is responsible for the new define section at the beginning of the code that makes selecting IMU, IMU data scales, and receiver type extremely easy to do. So big thanks to him!
One thing you will now need to do is copy the required libraries (included in the dRehmFlight download) and paste them in your Arduino libraries folder. More details in the 'Software Setup' section of the documentation.
Looking forward to seeing some of you get flying! -
Default Hardware Tutorial Video
09/17/2020 at 18:54 • 0 commentsHere is the first of (hopefully) many tutorial videos rolling out for dRehmFlight VTOL: Setting up the recommended default hardware. This video will show you how to solder the board together for full i/o capability with the default code.
-
Rcgroups Support Thread
09/14/2020 at 20:12 • 0 commentsHi all,
Here is the Rcgroups forum thread for all things dRehmFlight: https://www.rcgroups.com/forums/showthread.php?3706571-dRehmFlight-VTOL-Teensy-Flight-Controller-and-Stabilization
Feel free to ask questions here, share your setup, or get more information from other people sharing their experience with dRehmFlight.