 amith
amithWorkshop recording
Overview
The goal of this workshop is to give attendees a simple introduction to car hacking. By the end you'll be able to understand how to read, interpret CAN packets and use CAN packets to do simple exploits.
To participate in this workshop you'll need a Linux computer with sudo privileges to install software.
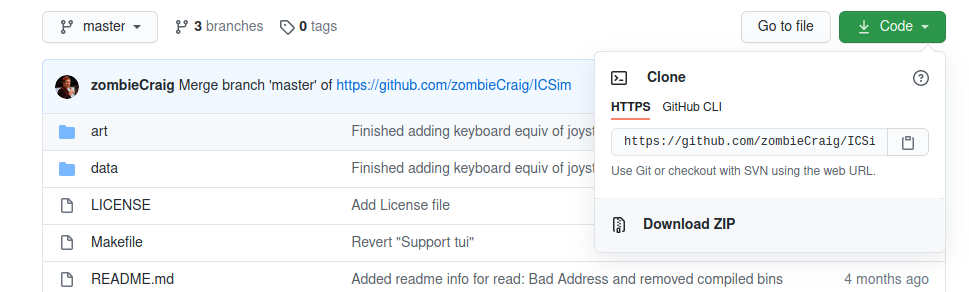
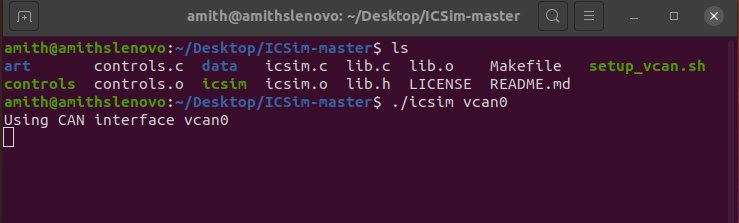
Before you attend the workshop you'll need to install two pieces of free and open source software. I provided instructions on how to do so below; scroll down until you see build instructions. If you run into some issues you can use the chat to communicate with me.
 And you should have a ICSim window that looks like this:
And you should have a ICSim window that looks like this: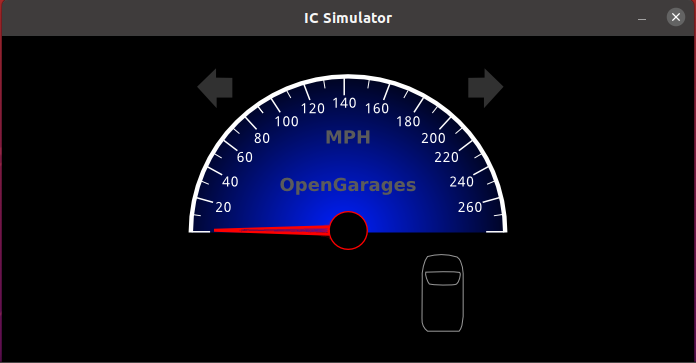



 EK
EK
 Philip
Philip
 Stanson
Stanson
 togglebit
togglebit
I recently switched to eco-friendly tires for my daily commute, and I'm impressed with the positive impact on fuel efficiency. https://wheelapex.com/how-to-make-rc-car-tires-grip/ These tires are designed with sustainability in mind, offering a good balance between performance and environmental responsibility.