Progress update on the project.
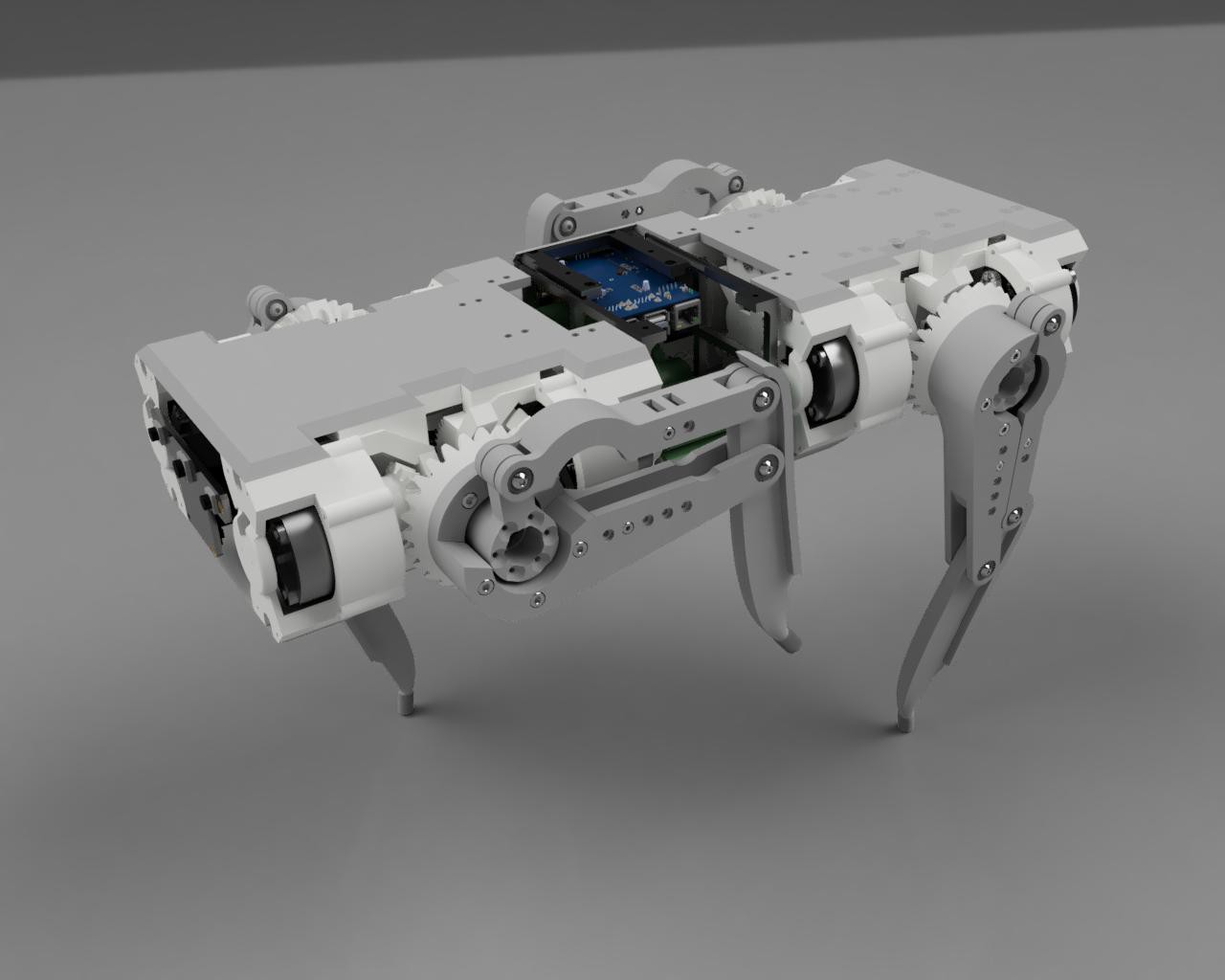
The design of the whole robot is close to being finished. There are new legs compared to the initial plan. The old ones were not stiff enough, so I'm trying a parallel links approach. However, I still need to test these - I'm waiting for new bearings to do that
I also managed to squeeze in Odroid C4 and 8x26650 A123 LiFePO4 cells together with BMS. These particular cells and BMS will provide ca 25v, 60 amps of power.
At the very front you can see OAK-D, which I'm expecting to get in a week or two. It's kind of hanging there, cause I couldn't find CAD model of a metal case that it ships with, so I will have to measure it once I have it in my hands.
Let me know how you like it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
This is an awesome design man!
Are you sure? yes | no