 Robotics CoLab
Robotics CoLabThe Robotics CoLab at Circuit Launch undertook building Reachy in the Fall 12 week session.
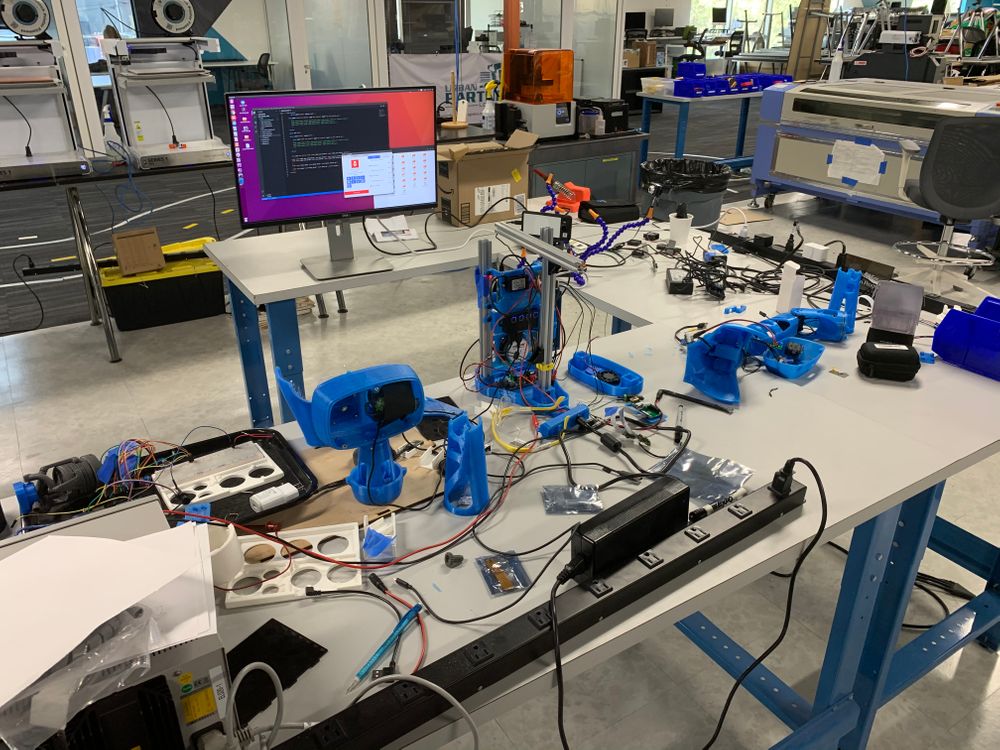
This open source robotics platform is available from Pollen Robotics and CoLab undertook building it from scratch. There were lots of challenges as Reachy is very new to the world and there isn't much documentation or community that has contributed to the project.
Our cohort of students, many who have never worked on a robotics project before succeeded in building Reachy and getting it to wave hello.
Challenges:
- Designed for SLS 3D printing, a lot of redesign needed to take place to make it in standard FDM 3D printing PLA.
- Electronics run using a Microservices Architecture called Luos rather than traditional widely adopted microcontrollers.
- No one outside Pollen Robotics had fully built Reachy before we attempted this.
We've published many of our notes, BOM, and documentation that we built along the way to contribute to the community as we begin our next CoLab session exploring Robot Human Interaction Design



 Afreez Gan
Afreez Gan
 therobotstudio
therobotstudio
 Doan Hong Trung
Doan Hong Trung
 Vishwajeet Narwal
Vishwajeet Narwal
https://ihumen.utm.my/ijidm/wp-content/uploads/sites/6/CR58-IJIDMEditbyrCm.pdf