 Vishwajeet Narwal
Vishwajeet NarwalWhy another open-source project?
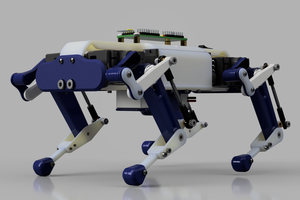
Unlike other DIY robot projects that focus on low-cost robot dogs using low torque BLDC motors and 3D-printed gear reductions, Pilla aims to be a high-performance platform that is simple and easy to assemble.
What makes Pilla stand out from commercial options is its open-source nature and transparency. Many commercial quadruped robots are closed source, limiting your ability to understand, modify, or improve the underlying algorithms. They often charge a premium for developer access, which can be a significant barrier for hobbyists and smaller organizations. Pilla, on the other hand, provides a platform that is transparent, customizable, and accessible without the financial burden of expensive developer fees. This democratizes advanced robotics, allowing more people to experiment, learn, and innovate.
What's our motivation?
Our long-term vision for the Pilla Robot project is to create a world where advanced robotics are accessible to everyone, fostering innovation and sustainability. By designing the robot to be 3D printable, we aim to empower individuals and communities to manufacture, assemble, and repair their robots locally. This approach not only reduces costs and environmental impact but also promotes a decentralized production model. We believe that by making robotics more accessible and customizable, we can inspire a new generation of developers, startups, and tinkerers to create sophisticated real-life applications and drive the future of robotics.

 Dejan
Dejan
 Scott - SpierceTech
Scott - SpierceTech
 William Chiu
William Chiu