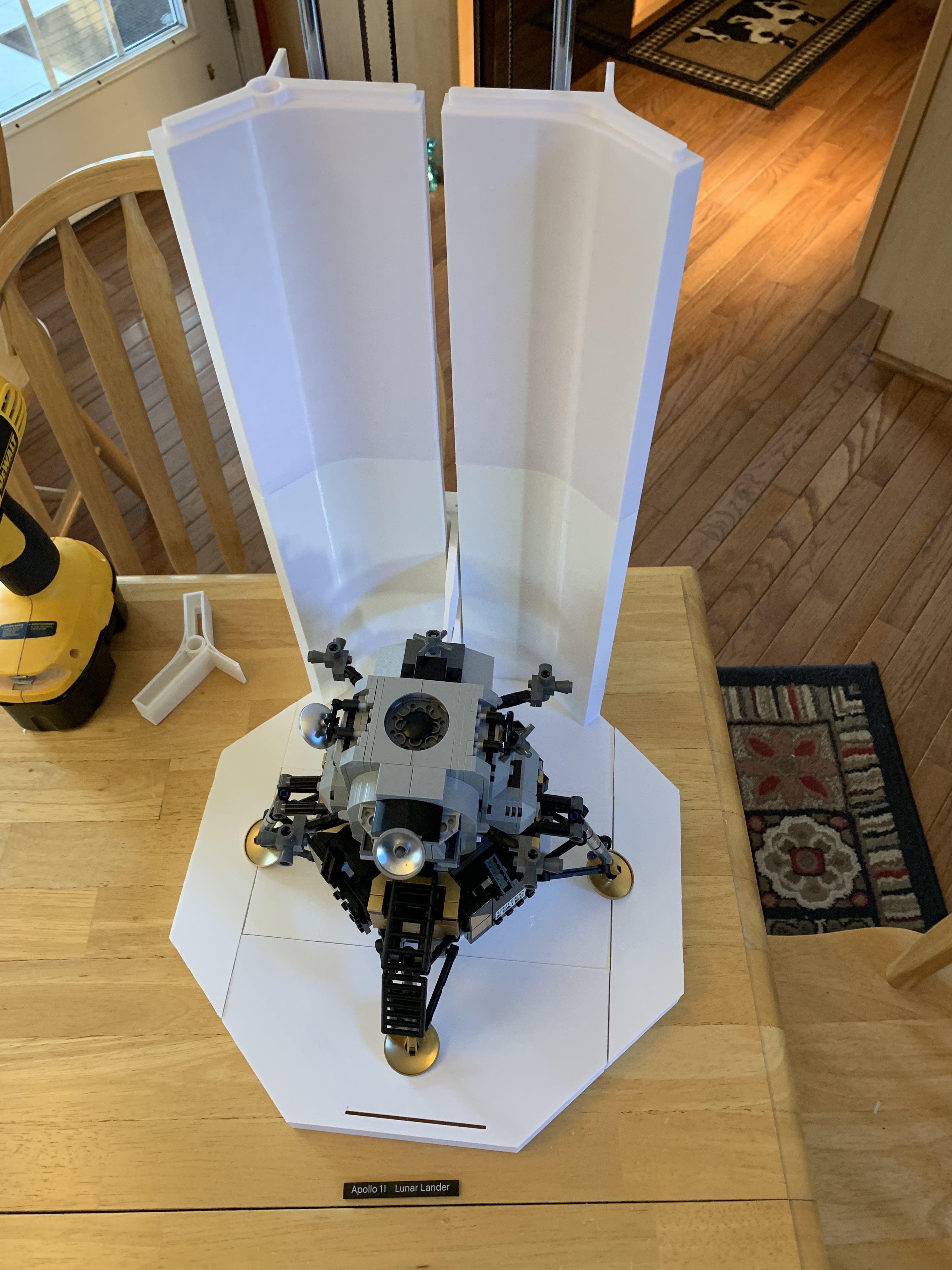
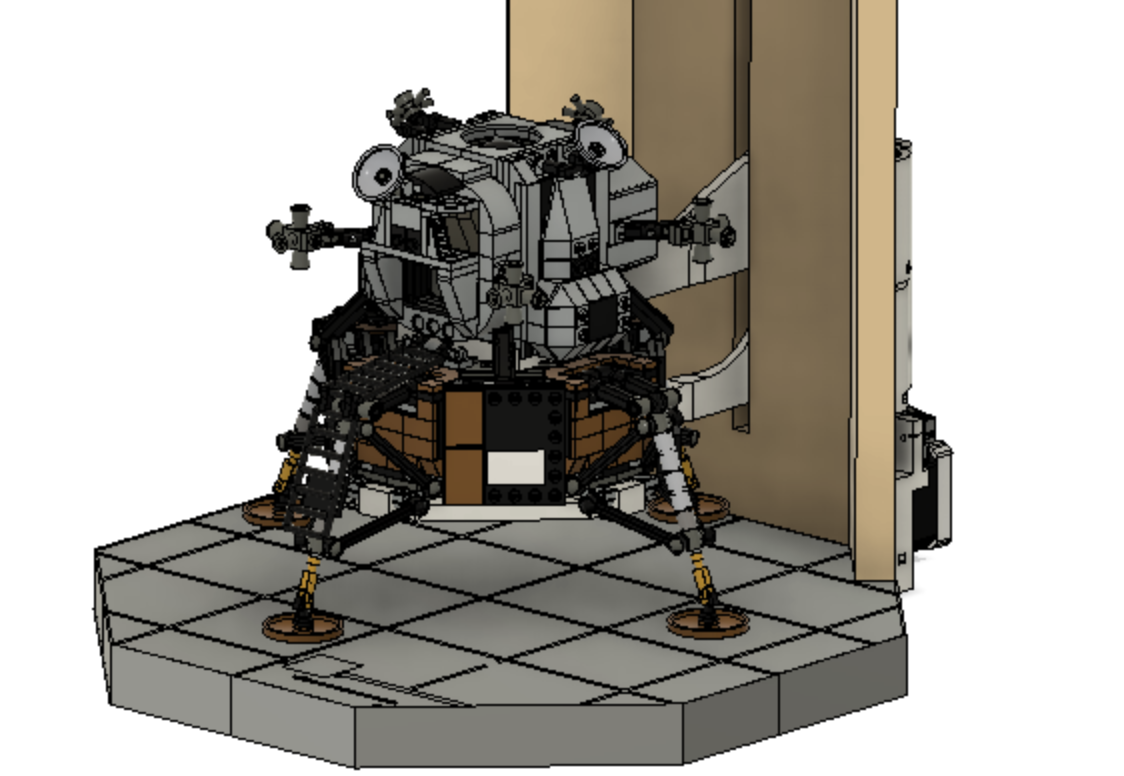
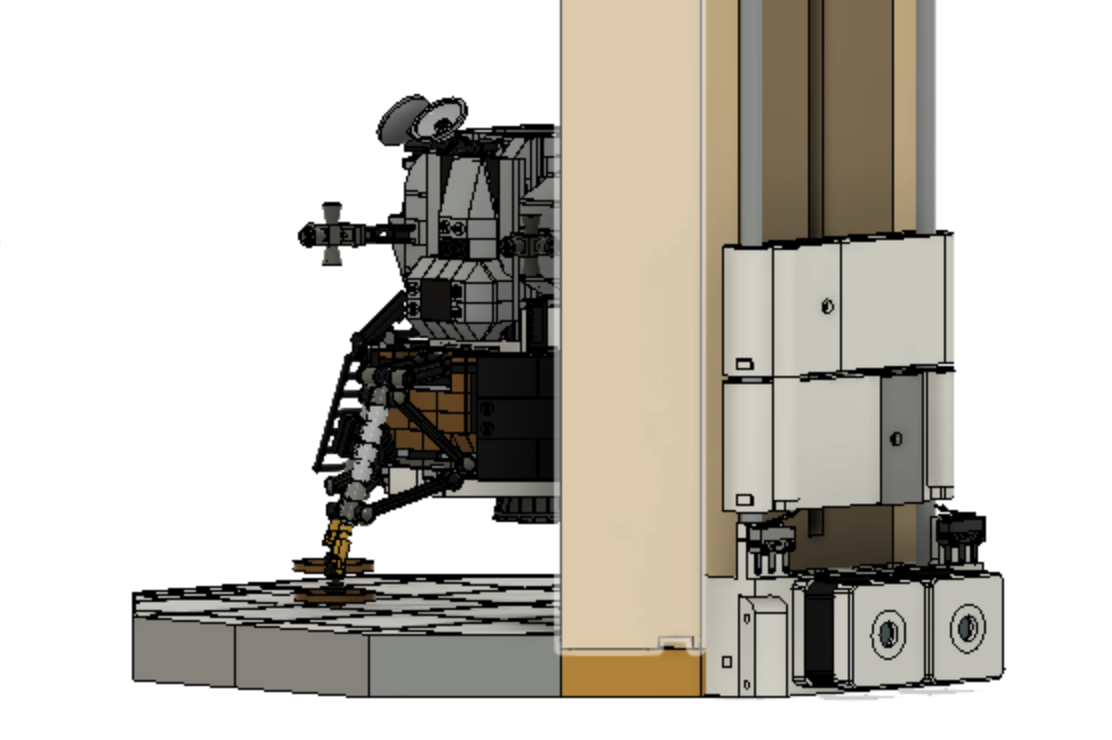
After some thought, I've decided to print the base and tower. I figure I can always go back to the orginal plan of constructing it out of wood if it doesn't work out. It will just take some time. PLA with a fill density of 5% seems to be strong enough. With a little filler and sanding it should look good. Nothing is glued yet.
After some quick programming of the Arduino Nano, first motion of the LEGO Lunar Lander (LLL) can be tested. Next decision is whether to make the stand out of wood or spend a few days printing it.....
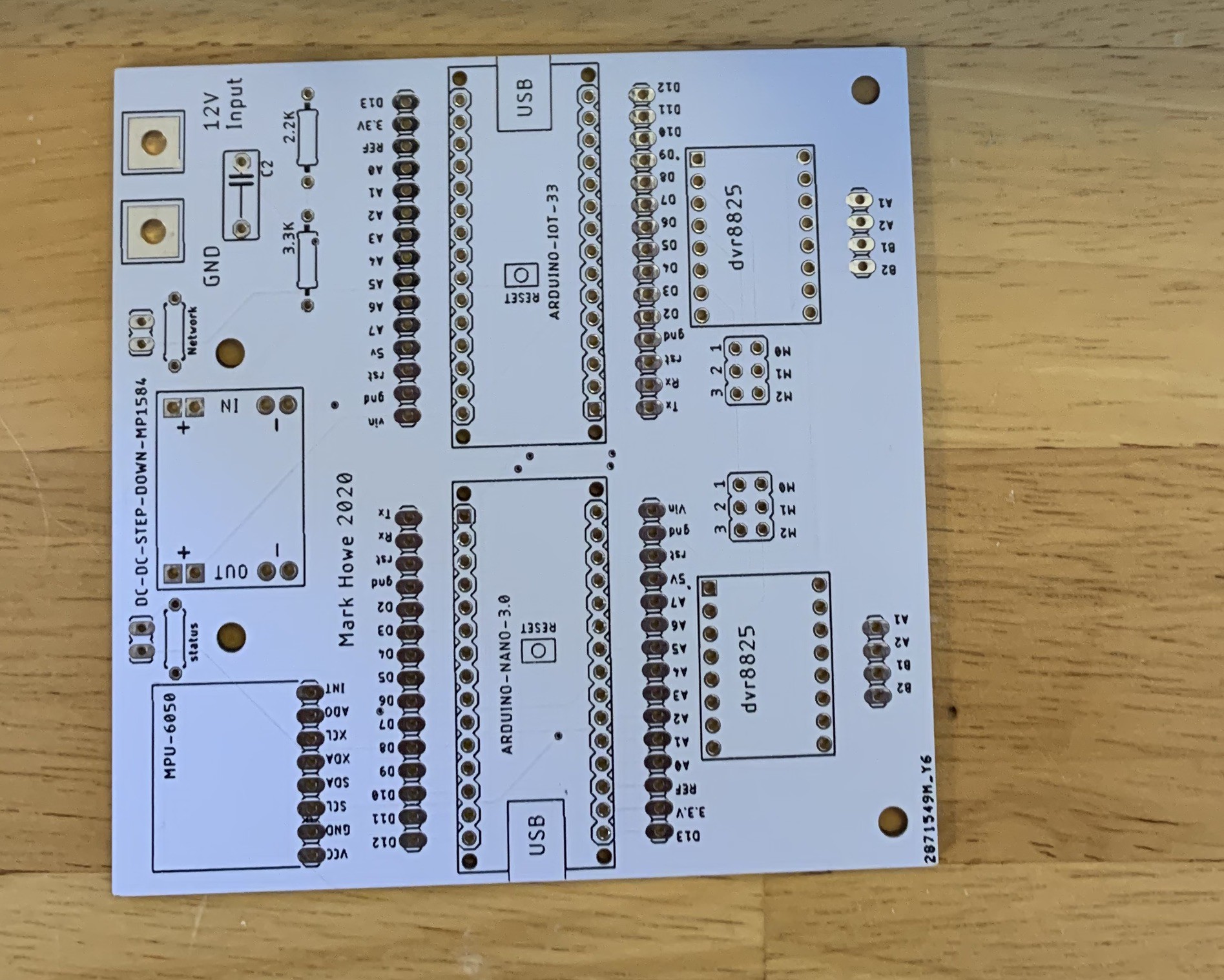
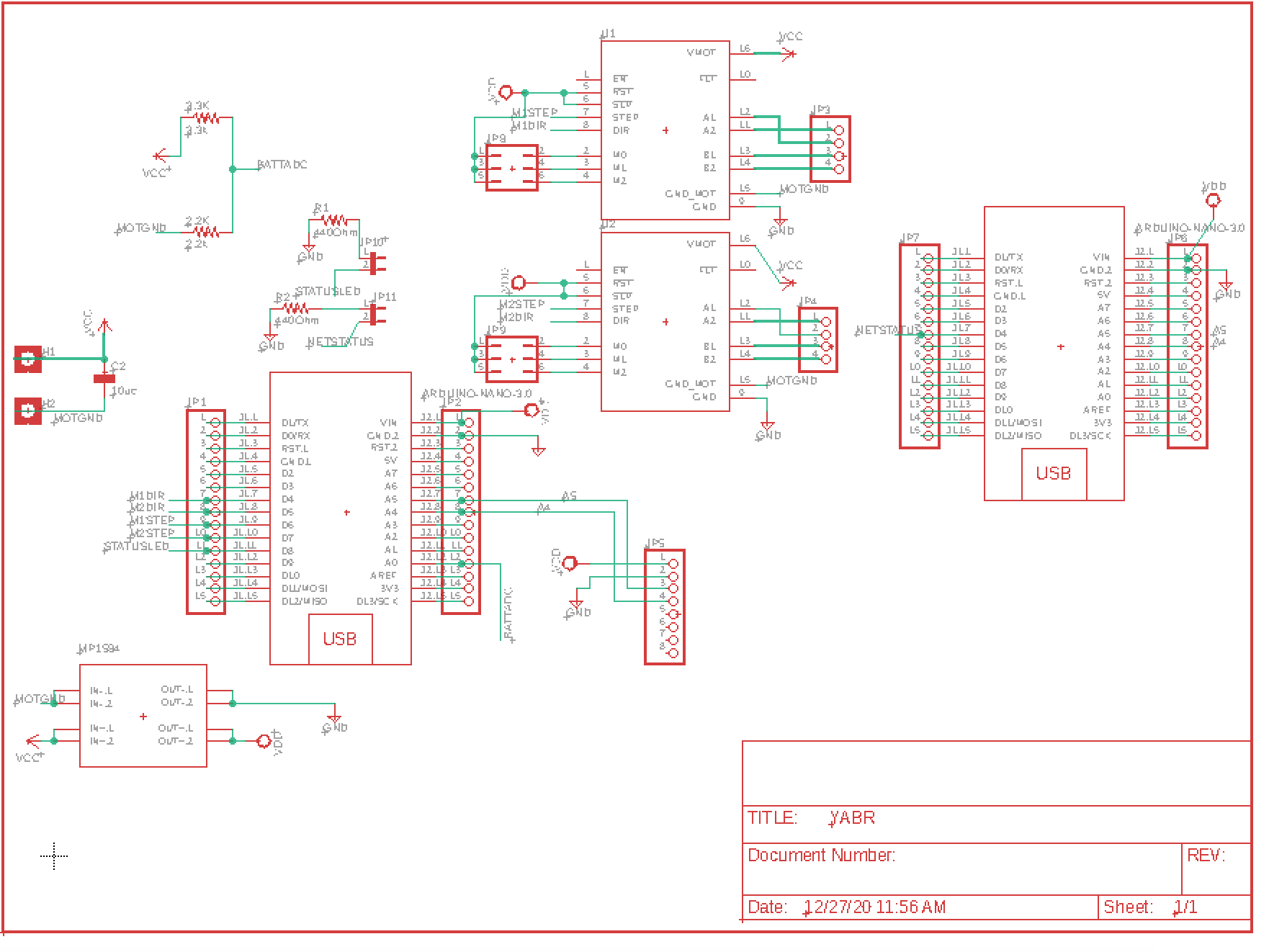
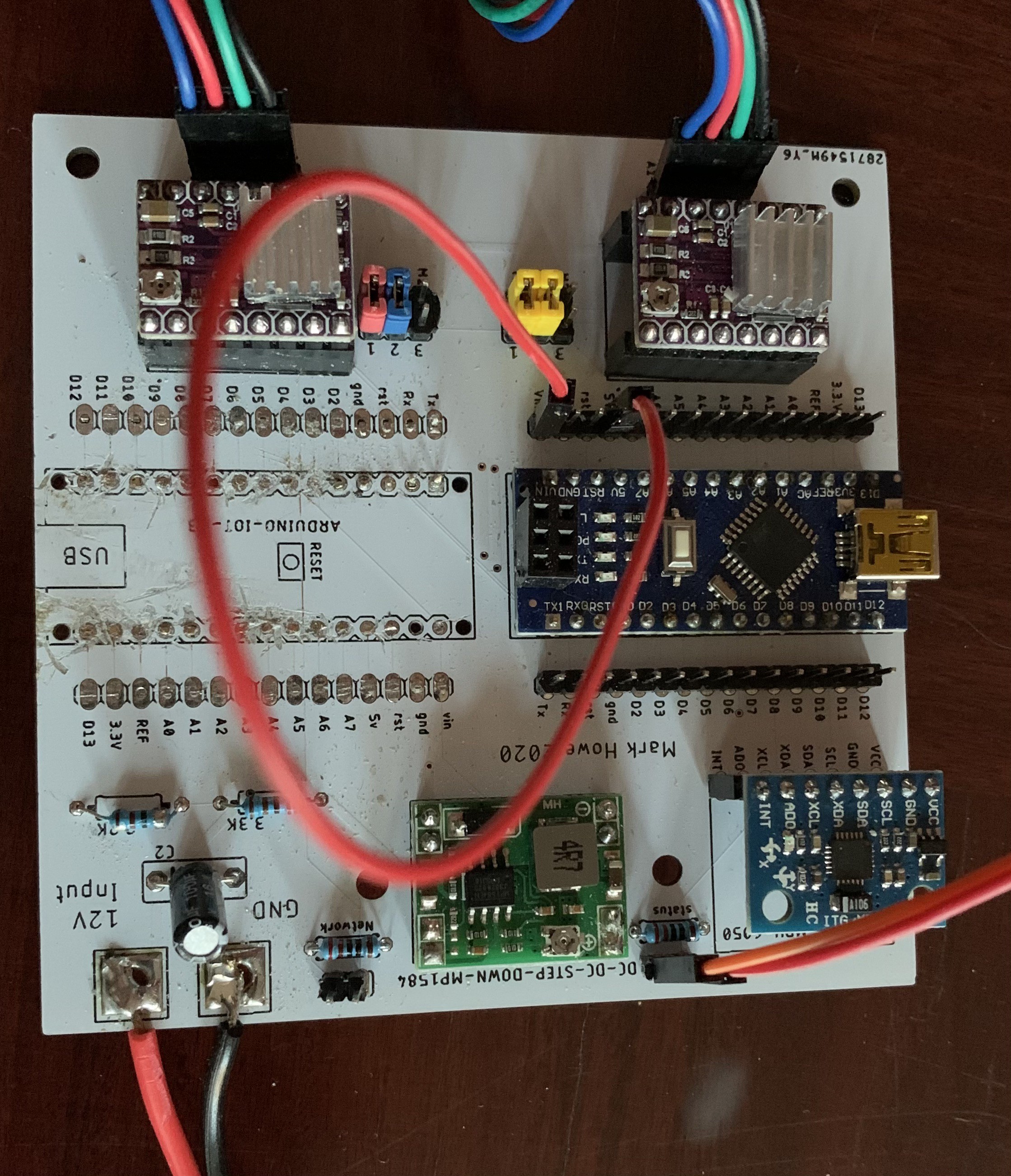
I happen to have some motor control circuits boards left over from another project that I'll use until I can design some more suitable for this project.
Unfortunately it has a serious bug where 5V was routed to Arduino Nano's Vin. Luckily an easy workaround was is to just cut the Vin pin and jumper 5V to Vin.
Board populated. The MPU-6050 is on the board, but not used. The red line in the foreground is the board bug fix.
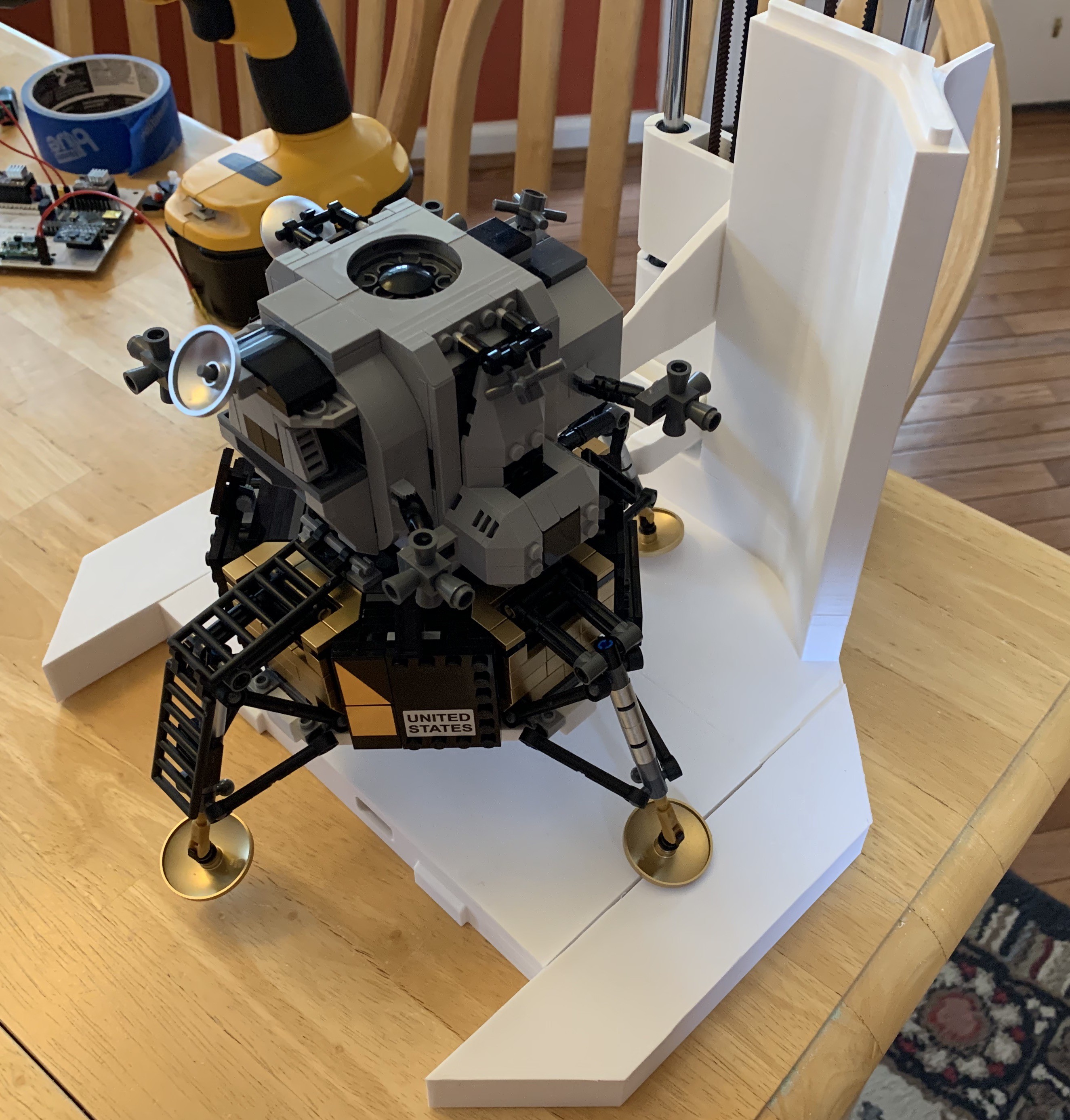
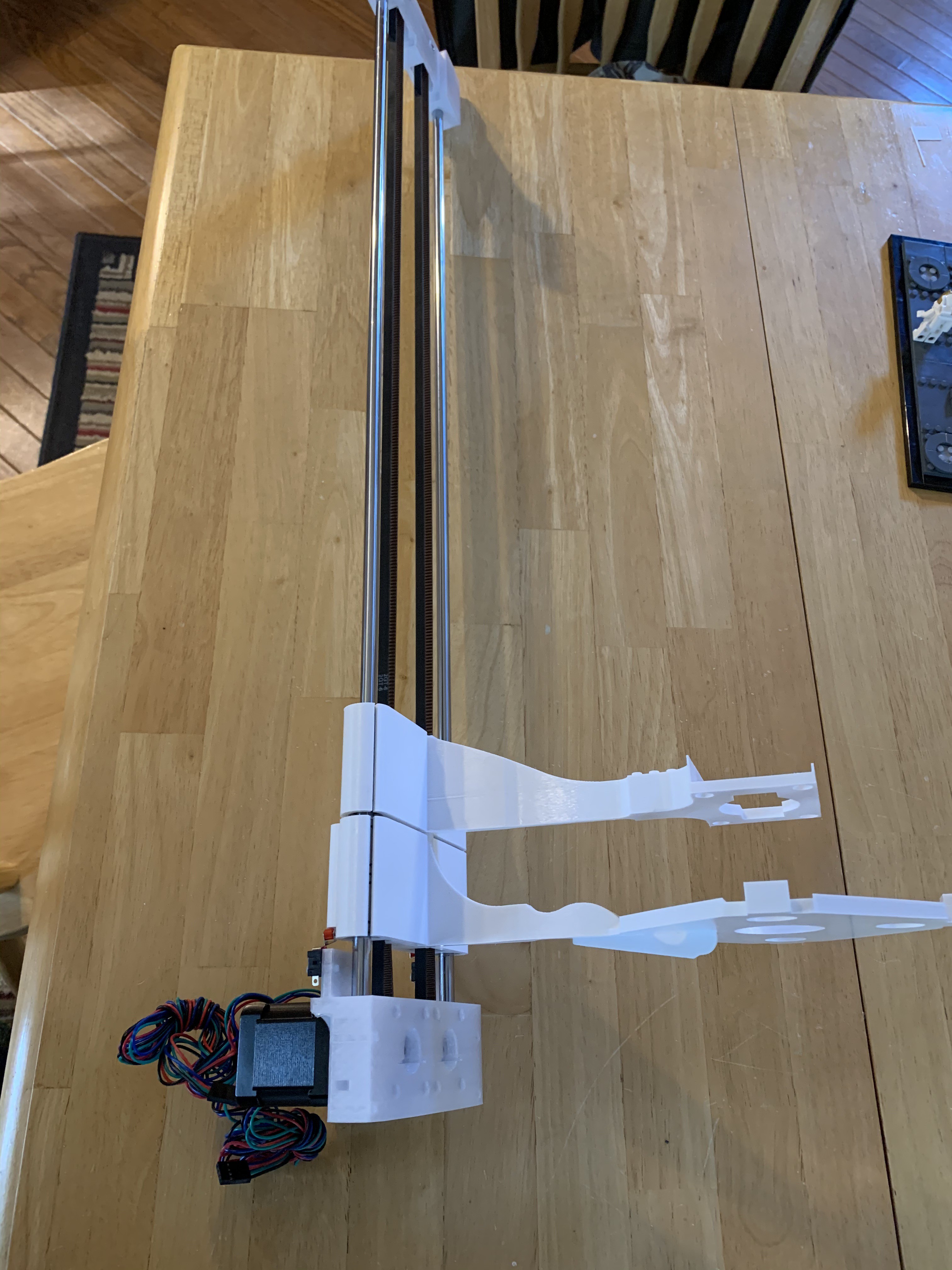
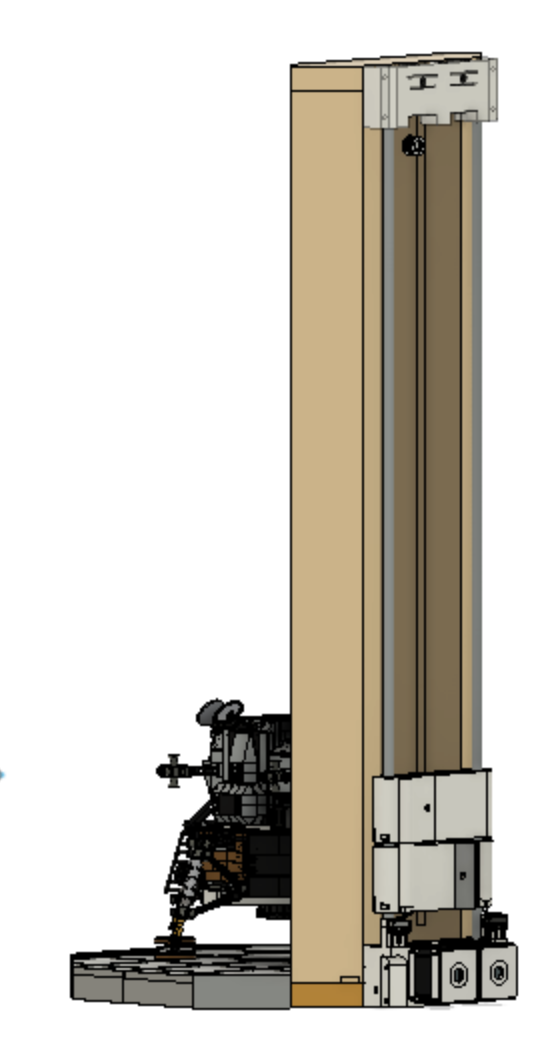
Parts finally arrived for assembly. After a few hours of 3D printing, things start to take physical shape. Everything is modeled after a 3D printer slider.
Everything fits!
A couple of 3mm bolts are used to push down on the motion rods to adjust the tension on the timing belts. Idler pulleys ride on 3mm bolts. Top and bottom rod holders are printed with PET. Ascent and descent stage parts are PLA.
The idea is to have two linear motion cantilevered arms acting in parallel to land the LEM and then have the ascent stage take off, leaving the descent stage behind. Some CAD modeling is done for a first pass.
 Mark Howe
Mark Howe