 pat92fr
pat92frWelcome Kai ! He has joined the project as a contributor, and we are working on the third alpha firmware release, with some improvements :
- support of encoders I2C et PWM
- self calibration of motor / encoder
- faster FOC update (up to 16KHz)
- faster Position / Velocity / Torque PID loop
- 1Mbps CAN-FD user interface for control and feedback (position, torque, temperature, voltage, error)
- Fail-safe (brake when encoder error, over-heating, or under/over-voltage)
- new operating mode "Position control with torque limit and velocity & acceleration profile".
We have tested the current firmware with two different hardware configurations :
- A 40xx brushless motor and an absolute position sensor AS5600 with a I2C interface (1Mbps)
- A 50xx brushless motor and an absolute position sensor AS5048a with a PWM interface (1Khz)
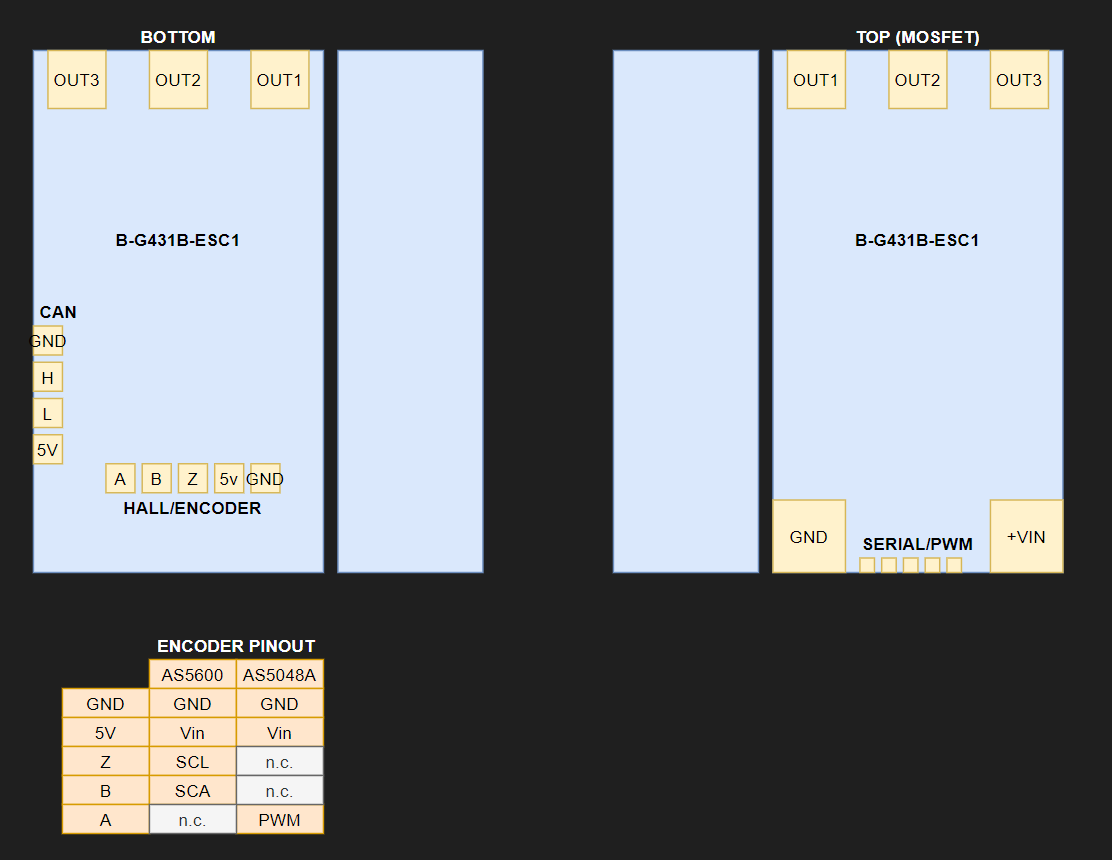
Here is the pinout of the ESC, with both I2C and PWM interface for encoders :
There are so many things to add and to improve.
Bye,
Patrick.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.