Justificación:
Se tenía la opción de realizar un robot hexápodo o un cuadrúpedo. Nos decidimos en trabajar con un robot cuadrúpedo para poder reducir costos en cuanto a la compra de sevomotores y uso de material, ya que se tiene planeada la construcción física de este robot.
En cuanto al diseño de 4 patas, se investigaron las opciones de un robot inspirado en mamíferos y de uno inspirado en arácnidos. Decidimos optar por el diseño de arácnidos ya que este puede obtener una buena estabilidad con una menor cantidad de servomotores. El diseño que se presenta en este proyecto presenta únicamente 2 servomotores por pata, lo cual en el caso de un diseño inspirado en mamíferos no otorgaba una buena estabilidad ni un movimiento más bioinspirado, sino que en ese caso era necesario de al menos 3 servomotores por pata.
Nos inspiramos en el diseño del video que se muestra a continuación. Adicionalmente se logró verificar un correcto funcionamiento de las patas con 2 grados de libertad (2 servomotores).
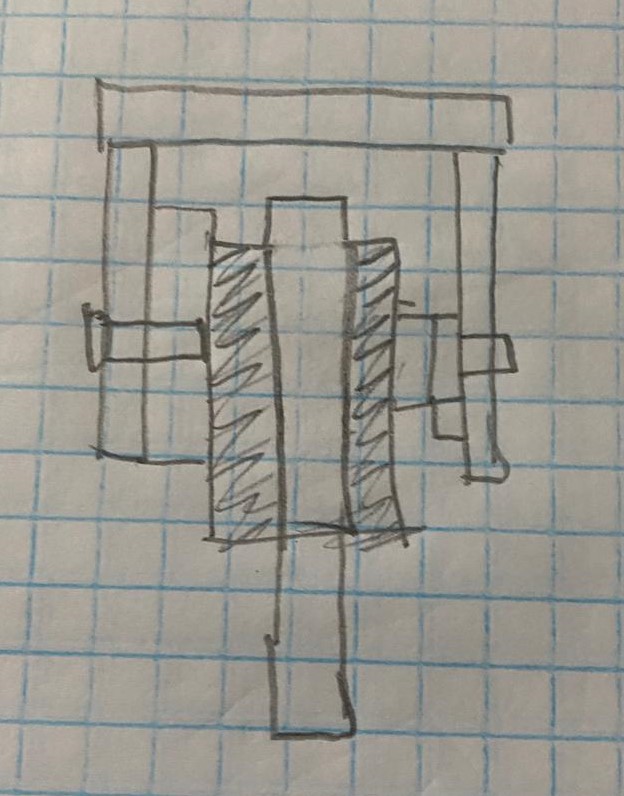
Partiendo de esta idea, se realizaron ciertos bocetos, principalmente para el diseño de la pata. En estos se ve que se mantiene el motor encargado de la rotación sobre el eje vertical en la misma posición. Por otra parte se cambió un poco la idea de funcionamiento del motor que se encarga de levantar la pata, inicialmente la pata iba a ser completamente una pieza recta y por debajo del motor de rotación, donde la salida del motor iba a estar anclada al robot y el movimiento sería mediante al cuerpo de servomotor. Esto se muestra en los siguientes bocetos:
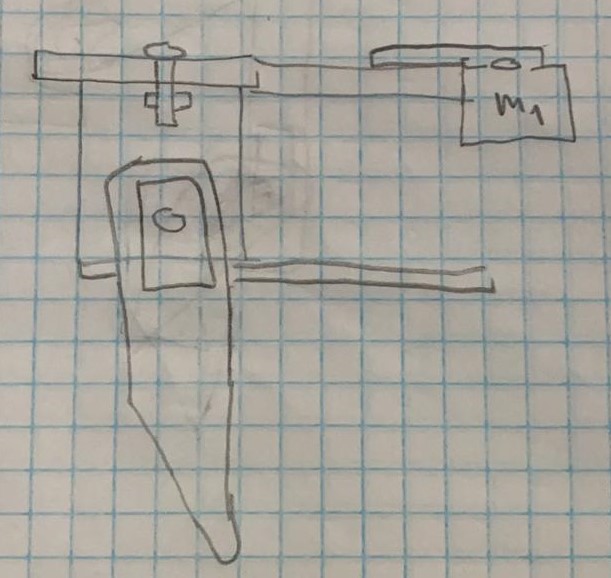
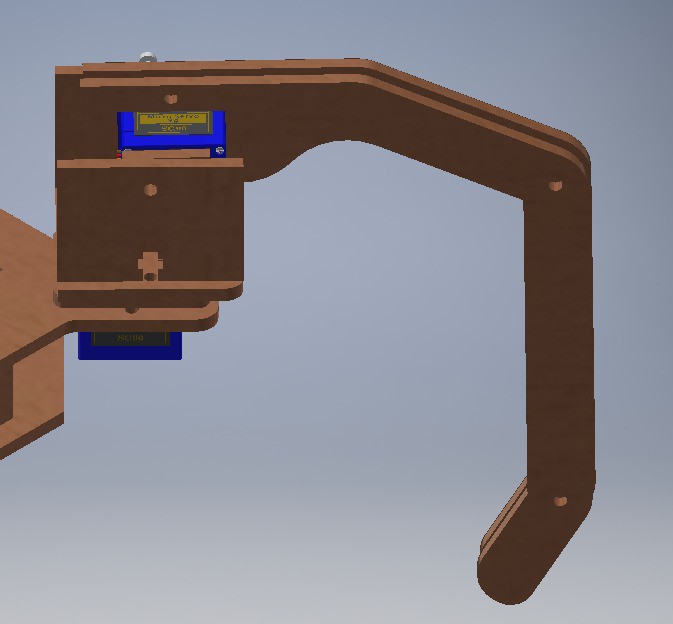
Eventualmente decidimos cambiar la forma de la pata, para otorgarle un movimiento más bioinspirado y también decidimos mover la posición del motor encargado de levantar la pata por encima del motor encargado de la rotación, esto con el objetivo de reducir el momento de inercia de la pata, lo cual facilitará su giro.
Validación de la selección de motores:
Se escogieron los servomotores micro-servo SG90, los cuales poseen un torque máximo de 2.2 kgf-cm. Se plantearon 3 casos críticos para analizar el robot y corroborar que los motores son capaces de soportar los movimientos deseados. Se espera tener un factor de seguridad de al menos 3 para garantizar un movimiento fluido.
El primer caso corresponde al movimiento de levantar una las patas. El motor debe ser capaz de igualar el torque provocado por el peso. Para ello se calculó el centro de masa de la pieza, por medio de el software Autodesk Inventor, y se utilizó la densidad promedio del MDF de 700 kg/m^3. El resultado indicó que se tiene un factor de seguridad de 45, lo cual indica que este motor cumple satisfactoriamente su función de levantar la pata.
El segundo caso corresponde a hacer rotar todo el ensamble de la pata. En este caso la gravedad no tiene efecto ya que la rotación ocurre en un plano perpendicular a esta. Se calculó la aceleración angular máxima que podría generar el motor al sistema y se analizó si esta es suficiente para el movimiento deseado. Para ello se calculó nuevamente mediante a Inventor el momento de inercia (también se aplicó el teorema de ejes paralelos para obtener la inercia sobre el eje de rotación de la pieza) y se empleó la segunda ley de Newton rotacional. El resultado indica una aceleración máxima del sistema de 3,543 rad/s^2. Esto suena un dato exageradamente alto, sin embargo esto se debe a la baja inercia de la pieza.
El tercer, y último caso, corresponde al torque necesario en los motores para sostener todo el peso de el robot cuando se encuentra en 3 patas. Para ello se sabe que la fuerza normal ejerce un torque sobre las patas, y ya que el robot es simétrico se aproximó...
Read more »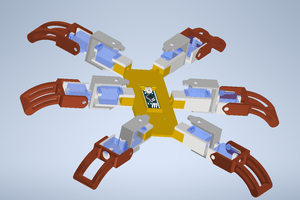
 Ricochetrj
Ricochetrj
 danfer adrian
danfer adrian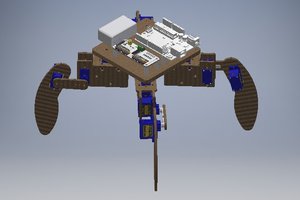
 PabloCastillo17348
PabloCastillo17348
 Isaac
Isaac