 Implemented Robotics
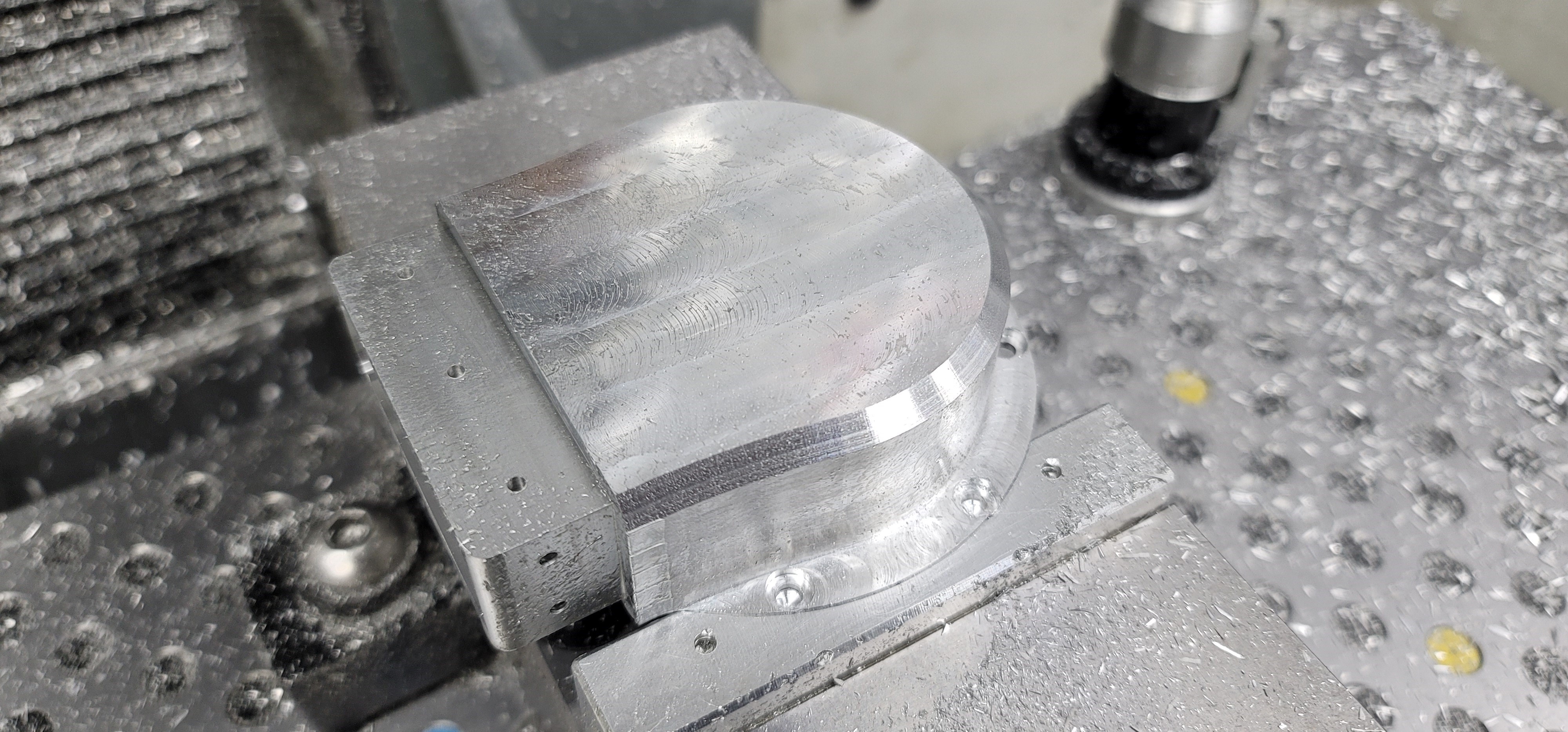
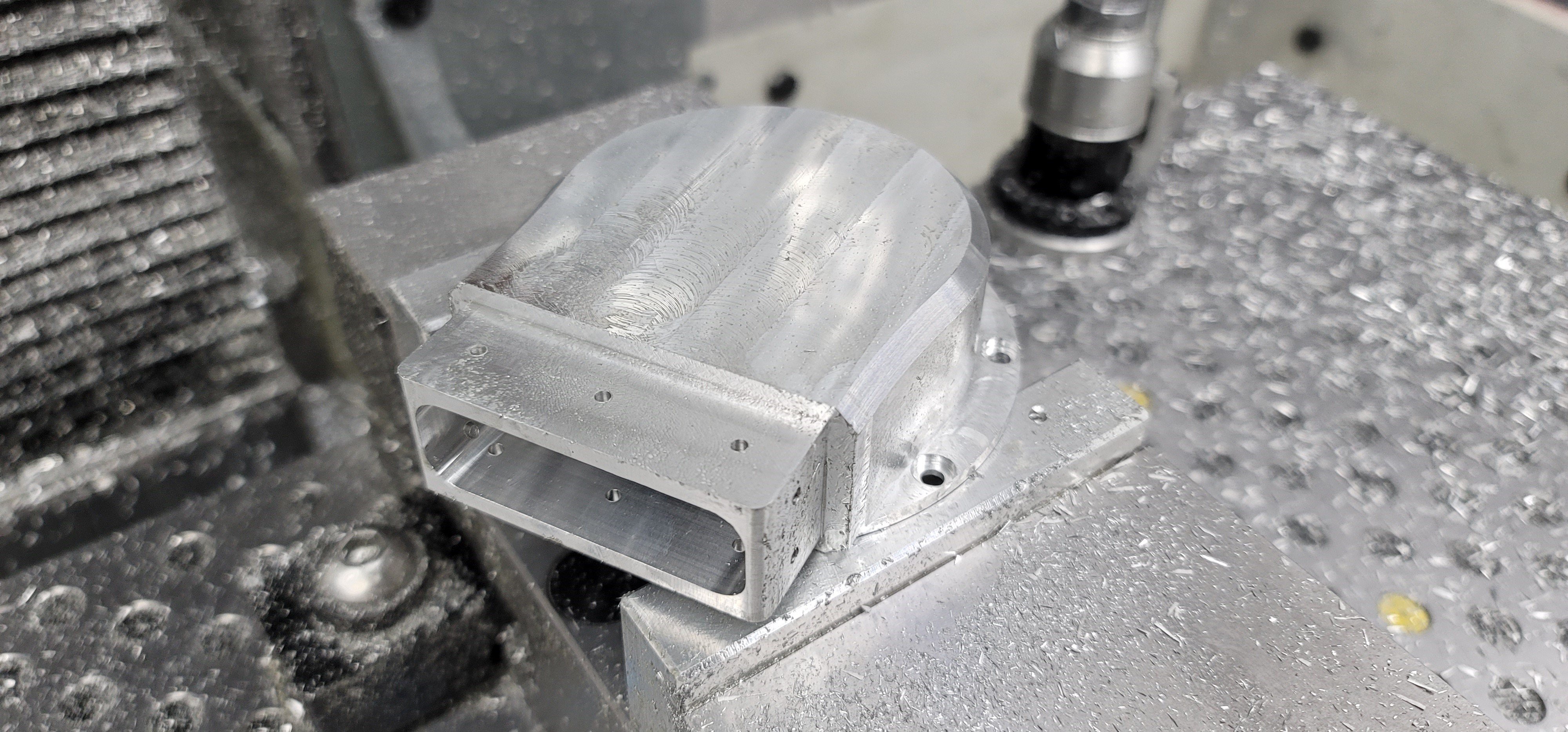
Implemented RoboticsMachining one of the NOMAD shoulder motor to leg mounts. Was a tricky operation with 5 setups. I will optimize the rest of them!


A project log for NOMAD Quadrupedal Robot
Medium-sized 12-DOF Quadruped Robot inspired by MIT Cheetah and Boston Dynamics Spot Mini
Machining one of the NOMAD shoulder motor to leg mounts. Was a tricky operation with 5 setups. I will optimize the rest of them!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.