Jrsphoto
Jrsphoto-
A little more progress
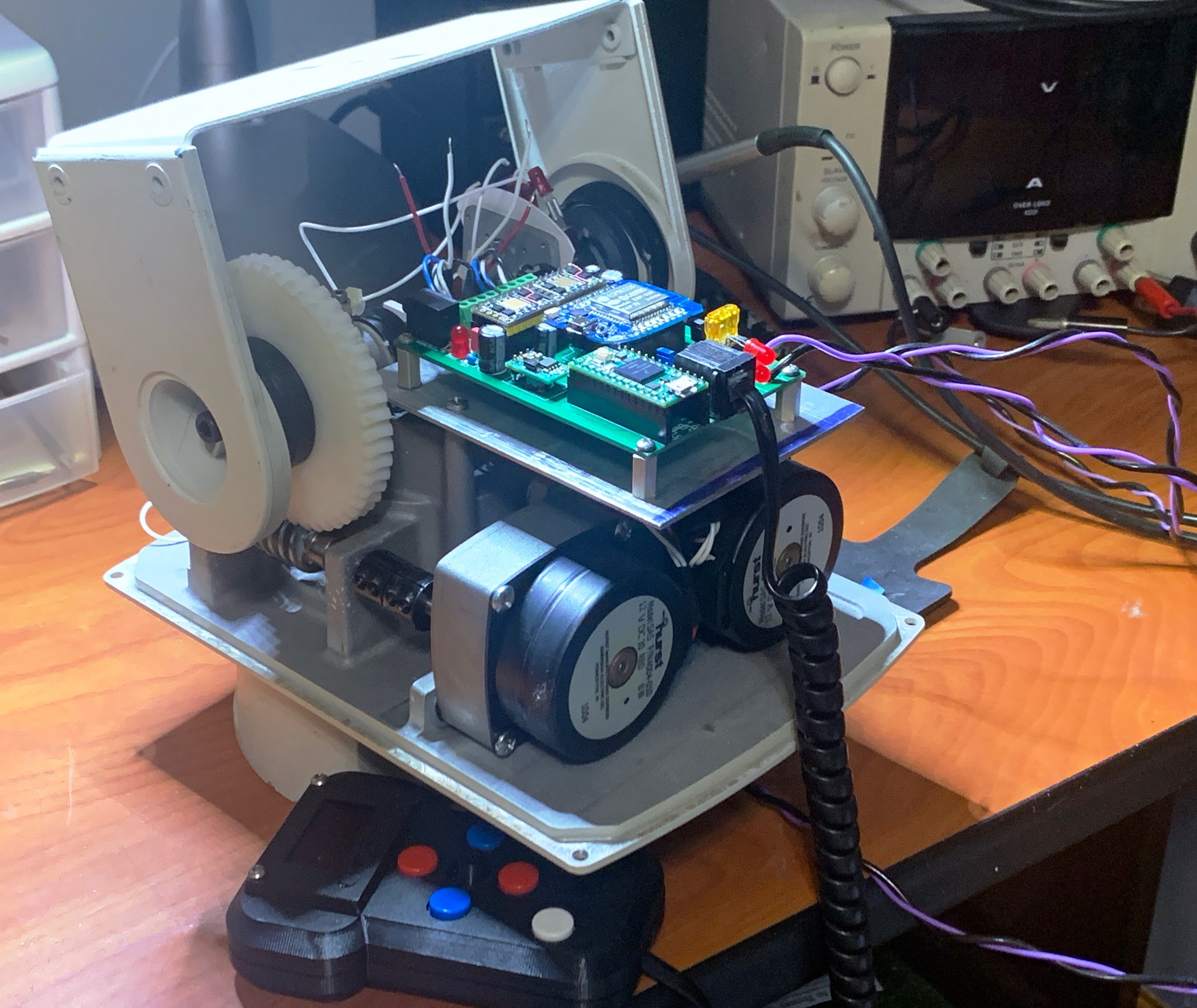
02/26/2021 at 07:18 • 0 commentsI spent some time tonight getting the Onstep controller mounted and the motors wired. I have not connected the alt/az limit switches yet, though they are wired up.
![]()
I’ve done some minimal testing with hamlib’s rotctld, rotctl, and gpredict, and things look good. Some issues with slewing speeds given the 0.25 deg/ step of these motors, but this was expected. How I’ll deal with this I’m not exactly sure. I’ll post a video link tomorrow.
-
New Motors
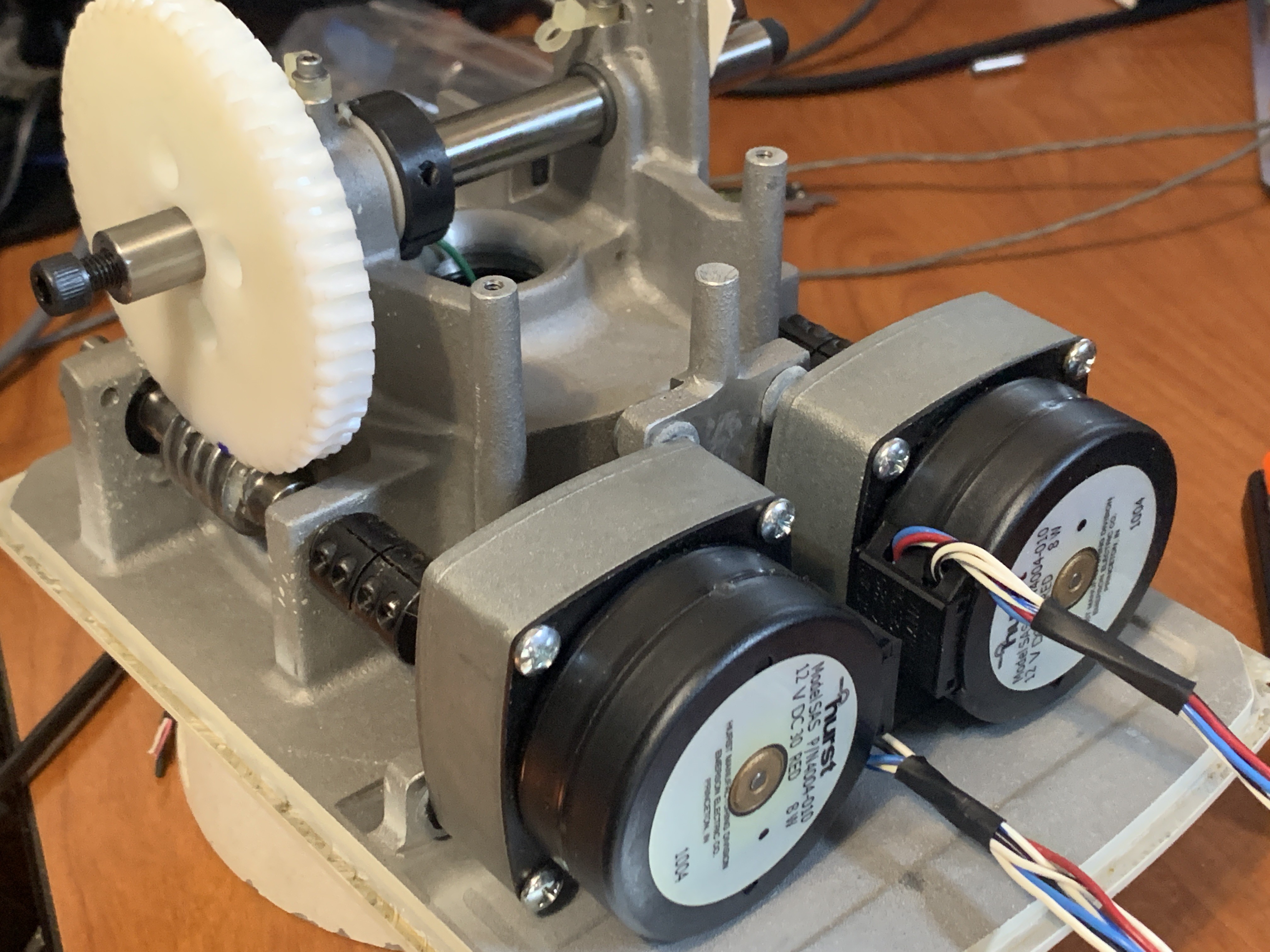
02/25/2021 at 19:13 • 0 commentsThe new motors came in today:
![]()
Old motor on the left. The new motor is also slightly thinner with the old motor being 54mm deep, and the new one just shy of 46mm.
And now to mount them:
![]()
I'll work on mounting the Onstep board and connecting the motors next..
-
Motion Control
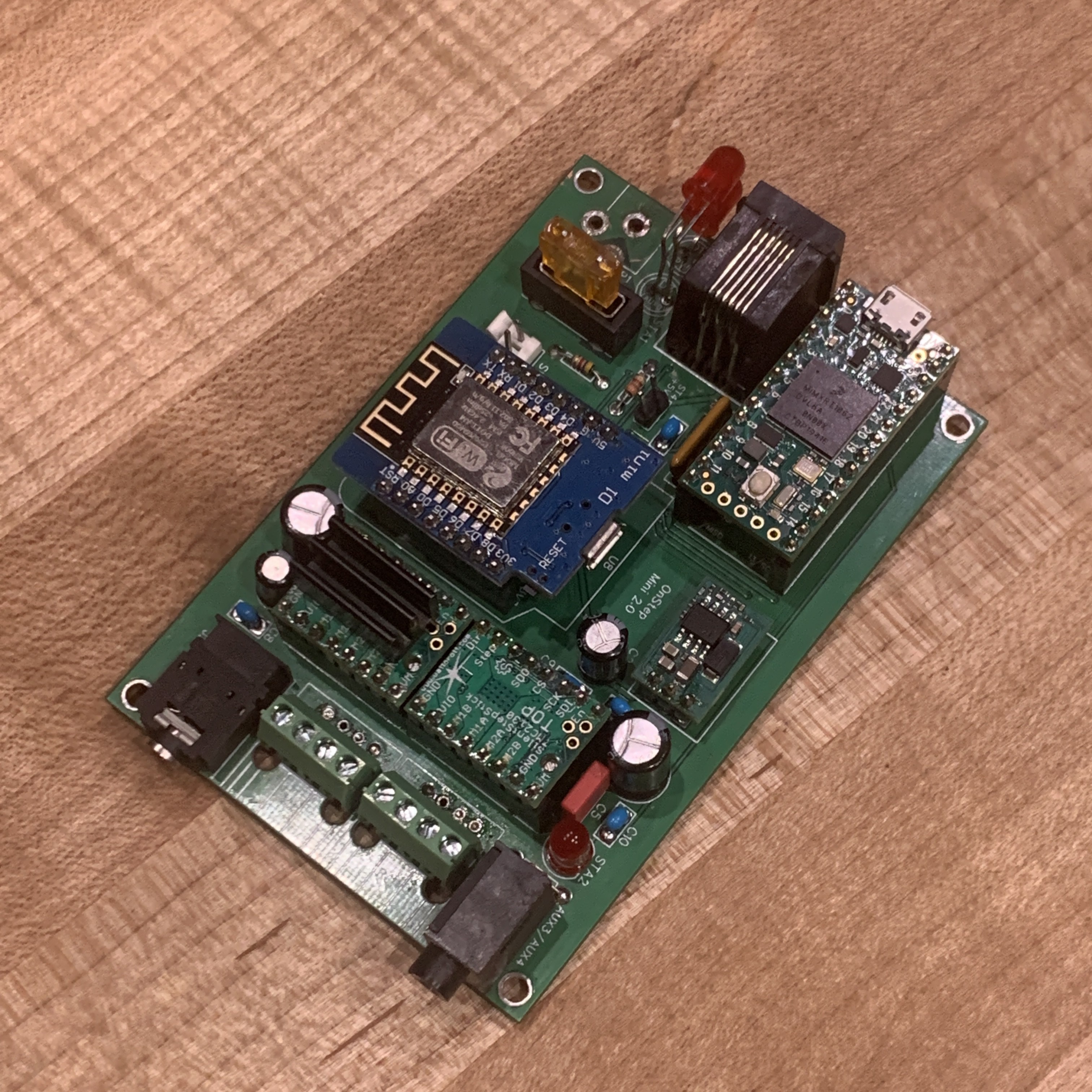
02/25/2021 at 03:28 • 0 commentsI mentioned that I plan on using the Onstep telescope motion control system to handle motion control for this rotator
![]()
Howard, the creator of Onstep, has quite a few models available, this one is the MiniPCB v2. and the processor can either be a Teensy 3.2 or 4. I've got a Teensy 4 in there as that's what I have. He also has a lot of options for stepper motor drivers. Just change the code to suit.
Limit switches are connected to the 3.5mm mini stereo jack on the bottom right.
What does this get me? A few things. One is, its use of an advanced version of Mead's LX200 protocol. That means theory at least, I could track satellites with something like kStars& ekos. Lots of power in those two systems.
-
Gear ratios and tracking
02/25/2021 at 01:27 • 0 commentsTracking objects in space requires very specific tracking-rates, depending on the object your interested in tracking. lunar, solar, and the Sidereal rate for stars. For satellites, things get interesting fast, and each one is different, and requires (for the most part) knowing its orbital elements for a specific point in time. The call this data, a Two Line Element Set or TLE.
For satellites, things move pretty quick and I need to have some idea of what tracking or slew rates this mount will be capable of, or all of this is for nothing.
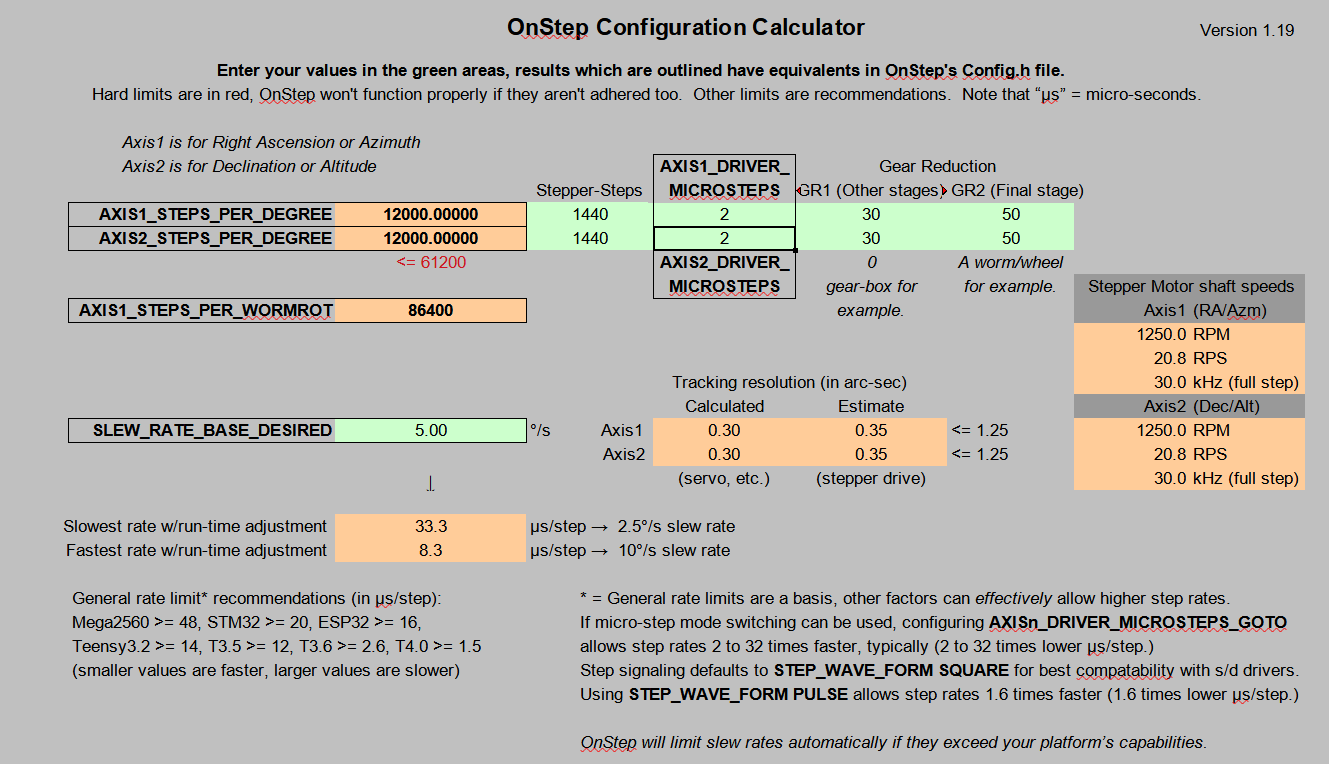
The stepper motors I'm using are 1440 steps/rev, and have a 30:1 gear reduction. So this makes things interesting if I would like to have a 5° / second tracking rate:![]()
I have my doubts that these motors will handle 1250 RPM!
Alt/Az Antenna Rotator from Pan/Tilt Camera Mount
Turn a COTS, Heavy duty pan/tilt camera mount into a functional satellite tracking Alt/Az mount for use with Hamlib