 Wissam Tedros
Wissam Tedros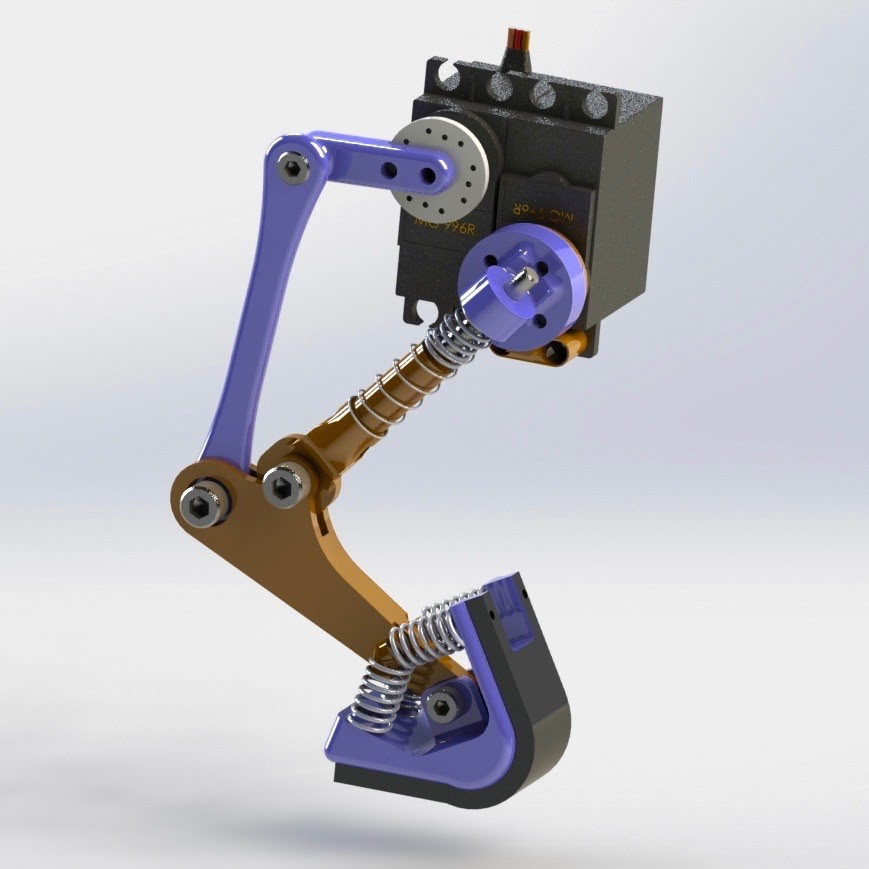

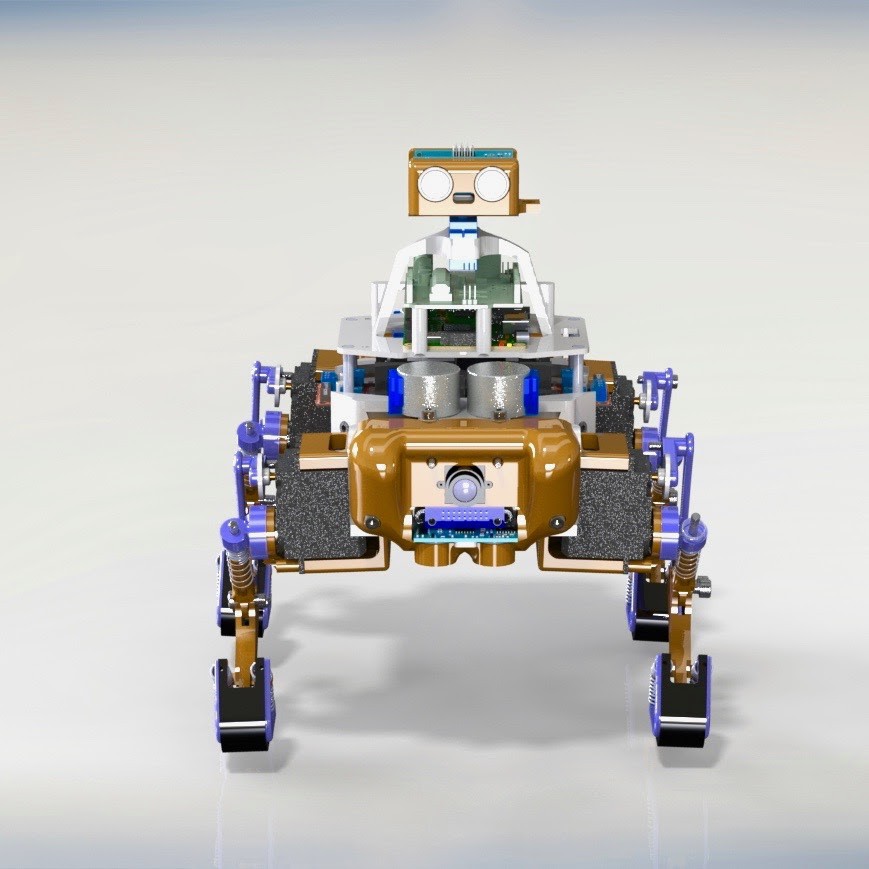
these first few project logs are going to describe the various iterations of this robot, before I decided to publish it on Hackaday, I first tried the approach of the 5 bars mechanism for the legs for versions one and 2, version one was not even assembled as I felt it was never going to work, after assembling version 2, I had some successful static motions, but the robot was consuming a lot of power, because the mechanism was just over-constrained, so I kept the same chassis and electronics and just went with a normal leg mechanism, where all the joints are actuated in a serial manner, I Got worlds of difference in performance, and the power consumption was exactly what you'd expect from 12 20kg.cm digital Servos, I just used an Arduino Uno and a raspberry Pi in my first prototype I knew it was just a test, so I ended up only printing the leg mechanism, to test it, and realized that it wasn't capable of actuating a robot. So I immediately started designing version 2

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.