0%
0%
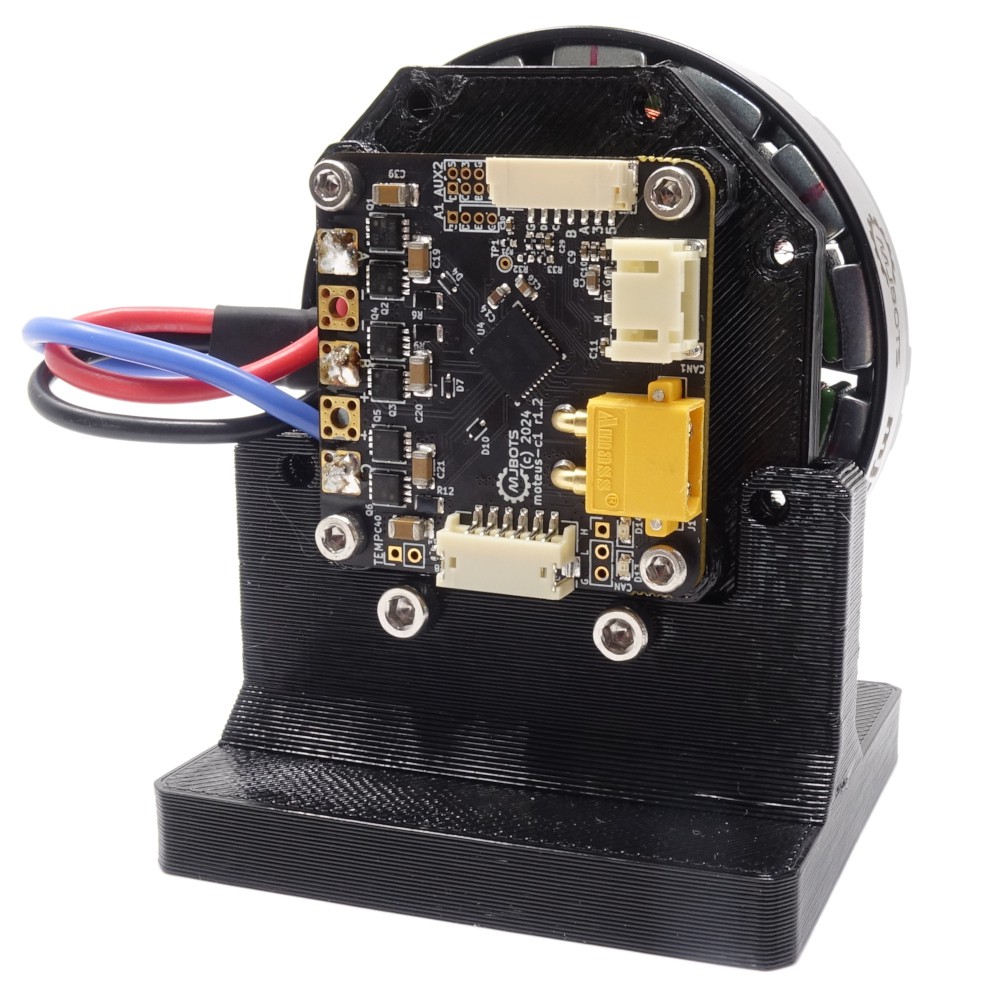
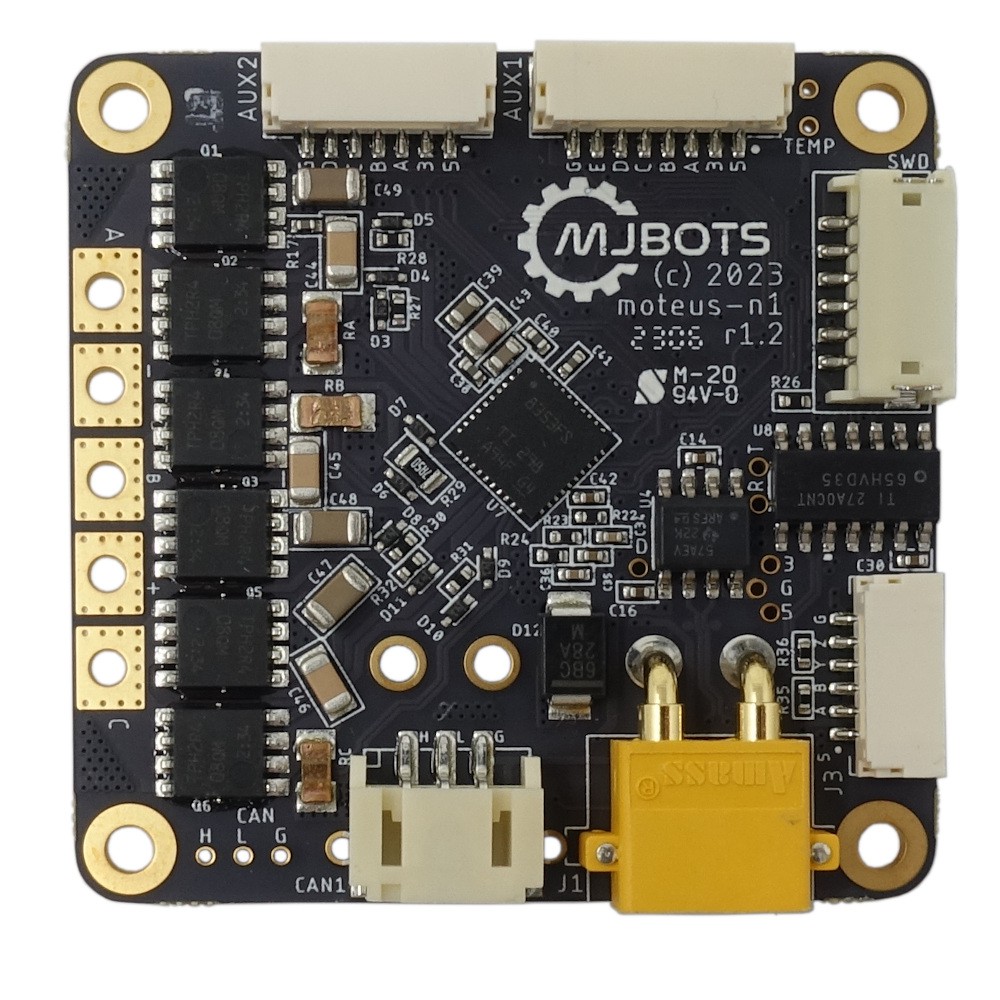
moteus brushless controller
Open source, compact, high performance, FOC based BLDC motor control
 Josh Pieper
Josh PieperBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests





 Phil Malone
Phil Malone
 Yannis Chatzikonstantinou
Yannis Chatzikonstantinou
 Yannick (Gigawipf)
Yannick (Gigawipf)
Love the design! I was wondering, how is the magnet attached to the motor for the encoder? Is it just glued onto the shaft?