 Sixth_Nassau
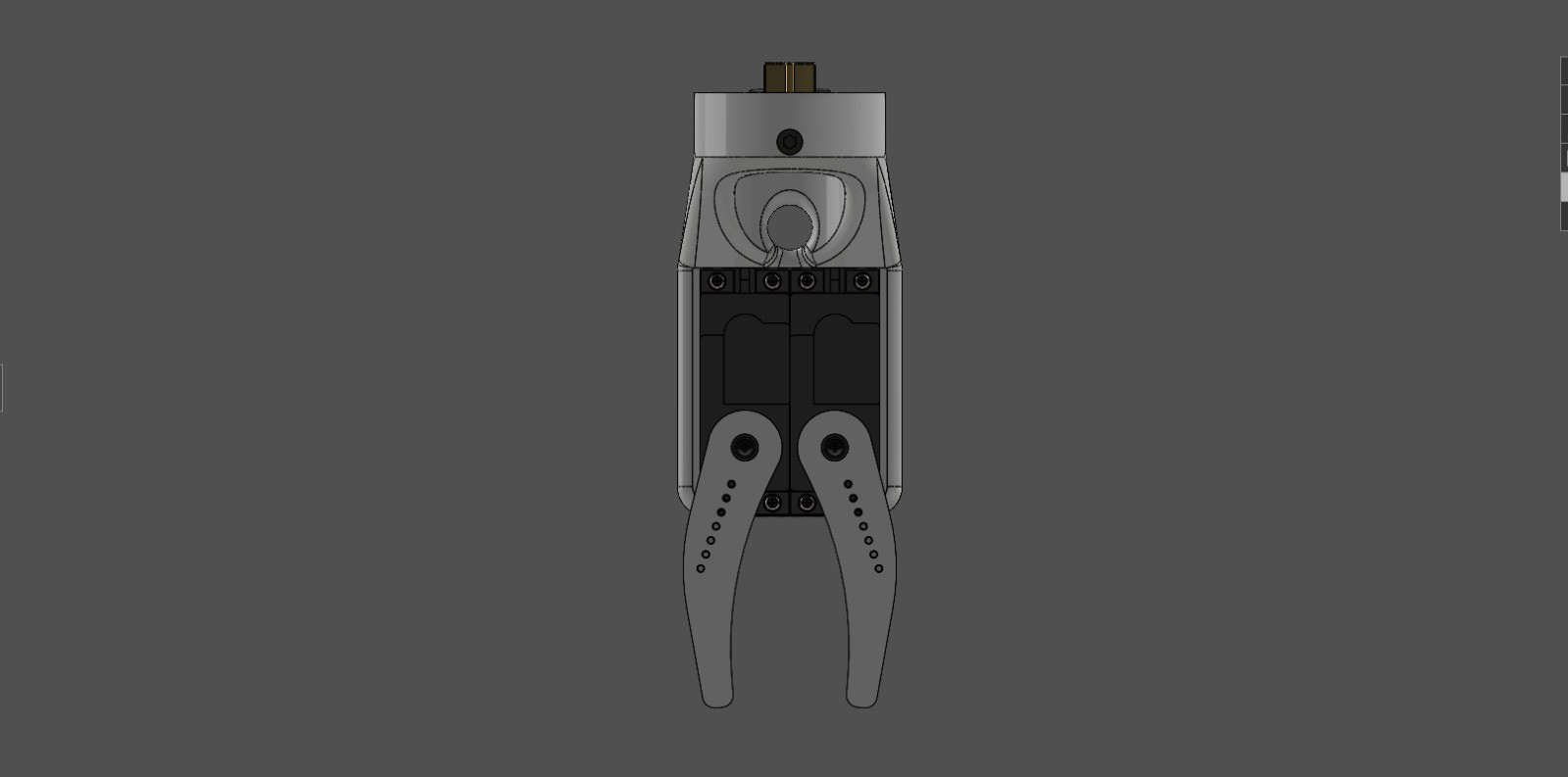
Sixth_NassauWay simpler design, it only consist of three 3D printed parts so that's convenient. Because the servo's are quite strong about 2.47Nm, I'm pretty sure they'll crush every paper cup you put in there.

A project log for PROJECT-A
5 Axis articulated robotic arm. Actuated by planetary reduced open-loop stepper motors.
Way simpler design, it only consist of three 3D printed parts so that's convenient. Because the servo's are quite strong about 2.47Nm, I'm pretty sure they'll crush every paper cup you put in there.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.