 Adrian Prinz
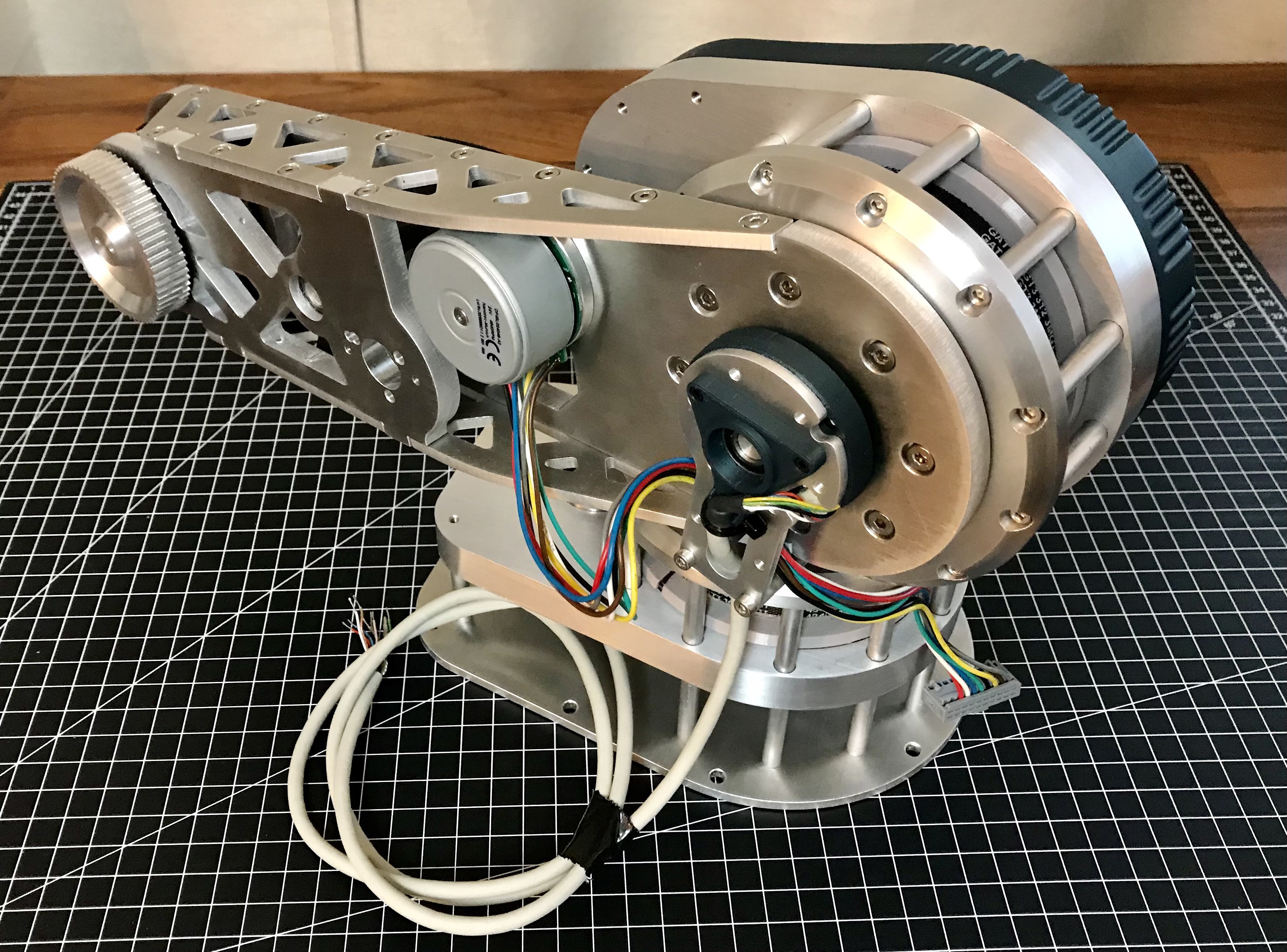
Adrian PrinzThe first 3 axis are assembled and two motors and one Absolute encoder is fitted. For now just 2 motors are used for testing
Part-assembly of the first three axis:

A project log for Dynamic 6-Axis Robot from scratch
I developed a 6 axis robot with half a meter reach and 3kg payload. It is servo driven and features absolut encoders on all axis.
The first 3 axis are assembled and two motors and one Absolute encoder is fitted. For now just 2 motors are used for testing
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.