-
Testing the Hardware MPPT Approach
01/05/2023 at 18:05 • 0 commentsI finally got a chance to try the hardware MPP approach in a working converter. I used the prototype for my Solar Charger. I had to remove one of the SEPIC cores to make room and hack a few changes into the backplane.
![]()
![]()
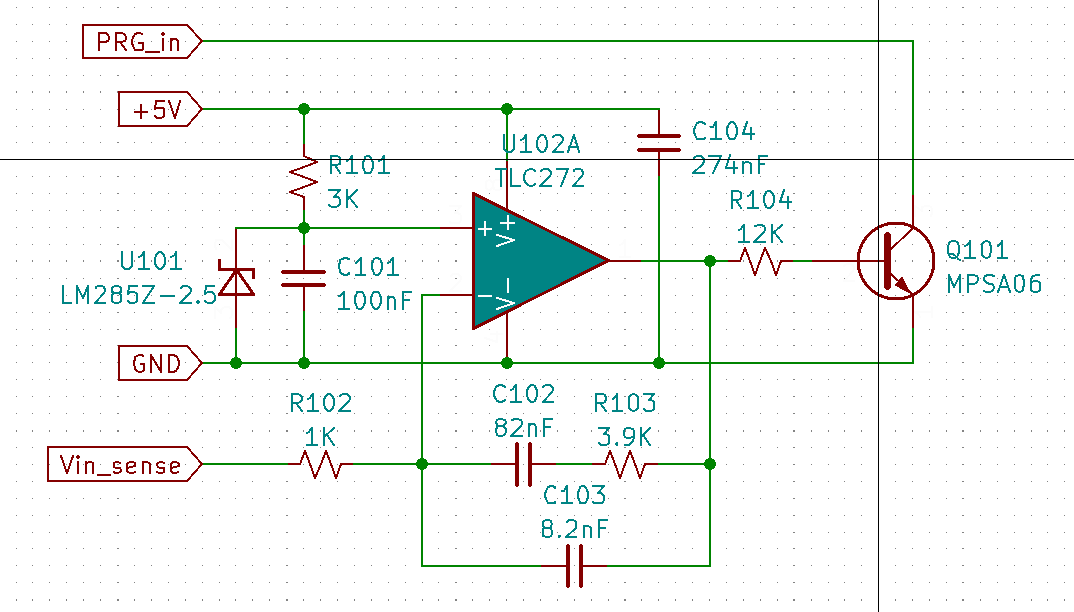
The MPP control loop is similar to the Closing the Loop (HW) log - a type 2 integrator with a zero at 500Hz and a pole at 5kHz. The phase boost is necessary because of a pole near resonance (~800Hz) between the input bulk capacitance and the SEPIC coupled inductor.
A challenge with any multi-phase converter is how to servo the output control loops equally & simoultaneously, and is very dependent on controller architecture. It turned out to be easy with the PIC. The output voltage control loop is common to all phases and drives the ramp generators (PRGs) for each phase' inner current loop. Rather than trying to directly limit duty cycle as I had earlier proposed, the MPP loop simply subtracts voltage from the error amp's output to obtain a duty cycle that maintains the input voltage at the MPP value.
A 1K resistor is placed between the error amp output and the PRG input pins and Q101's collector connects to the PRG side. R104 limits Q101's gain to the linear region. When the MPP loop engages, the PRG's input voltage is reduced which directly limits duty cycle. However, the output error amp knows no different - its gain & phase profile haven't changed. It sees the output voltage dropping and demands maximum duty cycle so, when the input voltage rises the converter's output power immediately increases.
A few hacks to the charger's backplane and firmware were required to test this.
Firmware- Disable output voltage sense.
- Remap PRG inputs from controller pin 22 to pin 3.
- Set input voltage measurement ratio to 20.
- Remove R112 & C129.
- Cut trace between R112 and via routing to bottom layer (output voltage sense must be kept intact to error amp).
- Install 1K resistor at R112.
- Add jumper from controller pin 22 to terminal 1 of R112 (30AWG magnet wire).
- Change R103 to 549 ohms (~2.5V for Vin=50.5).
- Add 100K resistor across pins 1 & 3 of J110 (to keep card over-temp from tripping).
![]()
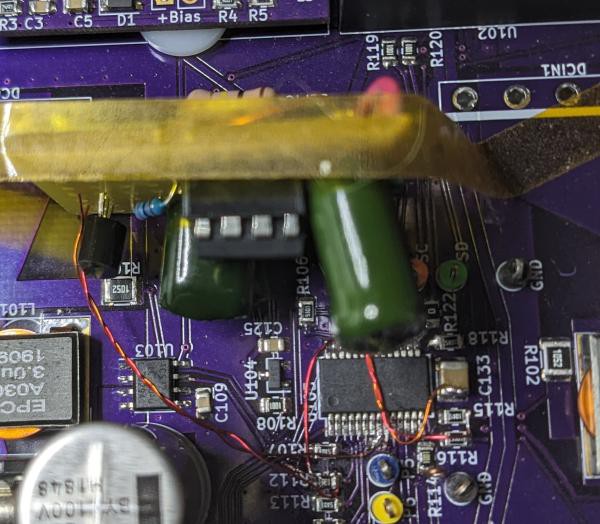
I built the MPP circuit on perf board using old parts I had lying around and used the power leads & polyimide tape to hold the board in place. Vin_sense connects to terminal 1 of R115, and PRG_in connects to terminal 2 of R112. Twisted pair (30AWG magnet wire) with a GND lead is used for both to maintain signal integrity.
I don't have a Vector Network or Frequency Response Analyzer so I did the next best thing: beat on it with a variety of simulated input & output impedance variations to observe response & stability.
![]()
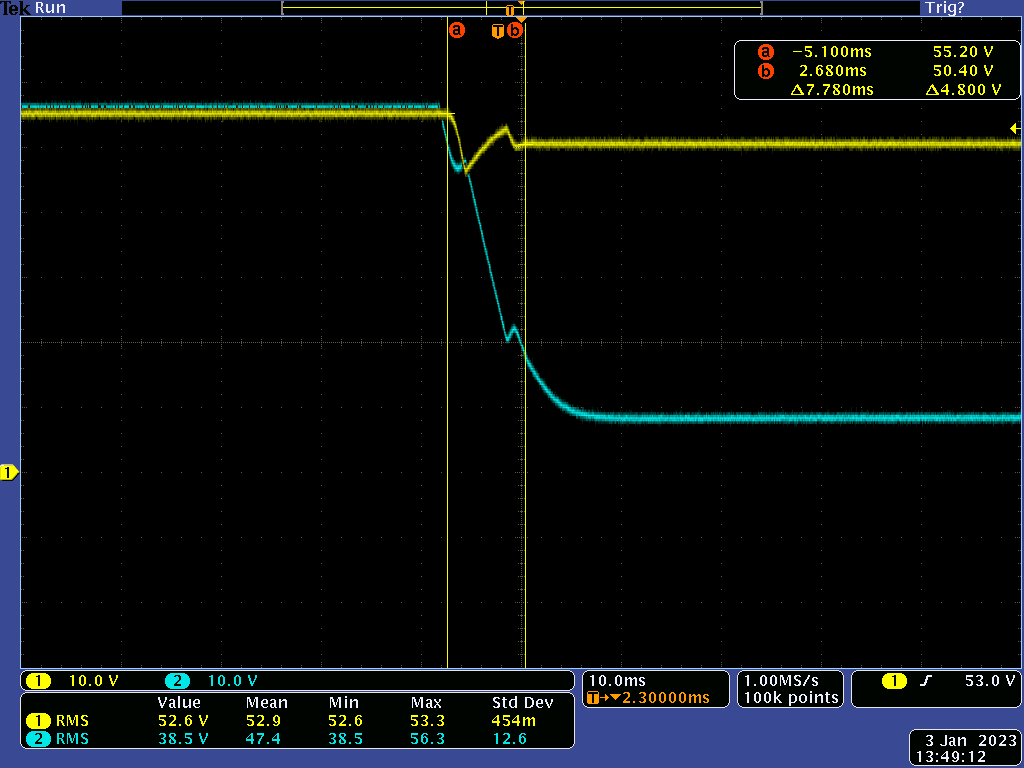
This trace shows overall response with a static 4A load. CH1=Vin, 2=Vout. At cursor A the input impedance changes from 0.3 to 2 ohms. The MPP loop's overall response is just under 8mS and is reasonably damped.
![]()
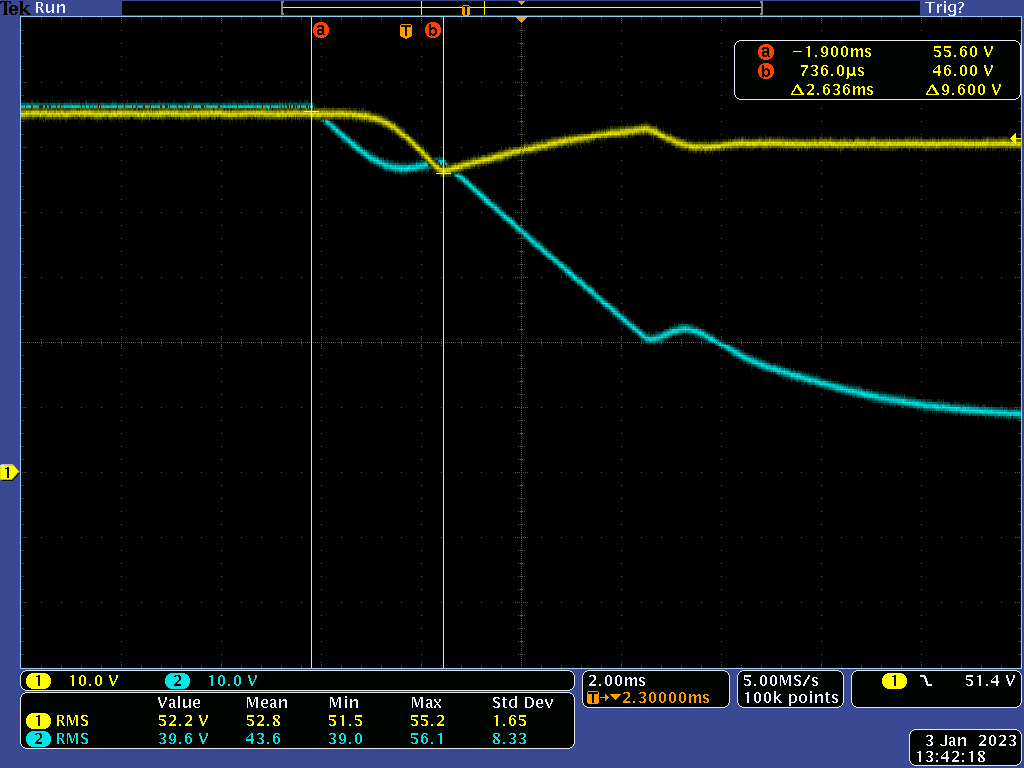
Same test but faster time base with cursor measuring loop's response before recovering to MPP value. Nothing to write home about but for MPP tracking I think this is decent.
![]()
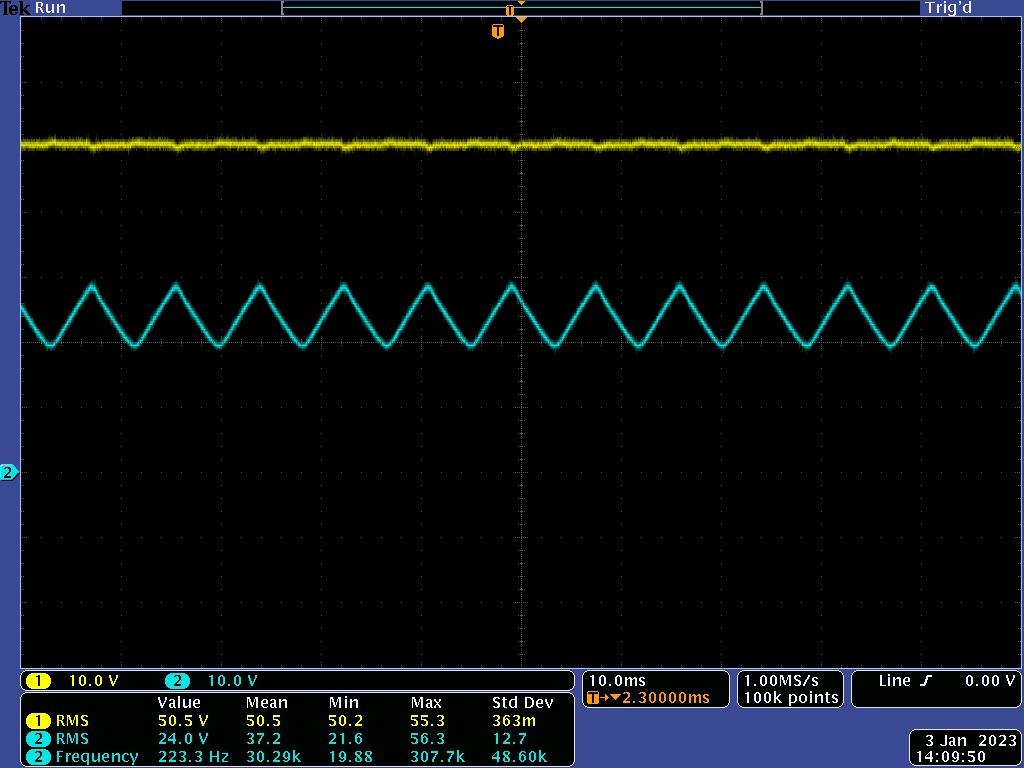
This trace shows MPP loop stability with a 120Hz impedance transient (1->4->1 ohm) applied to the converter's input. Vin holds steady at the MPP value with slight ripple.
![]()
The acid test is how it performs with a real-world load. For this I connected a 48V DC -> 120V AC inverter to the converter. In turn, the inverter powered a 1.5kW space heater via an auto-transformer that allows me to control the AC load. The power supply for the converter was set to 57V with a 3.3A current limit. The inverter will place a time varying (sine) load on the converter and by applying enough AC load the input power supply's voltage will drop to engage the MPP loop.
The only difference between this and a 'production' installation is the absence of a battery bank connected to the charger's output. This was intentionally omitted to place additional work on the MPP loop.
![]()
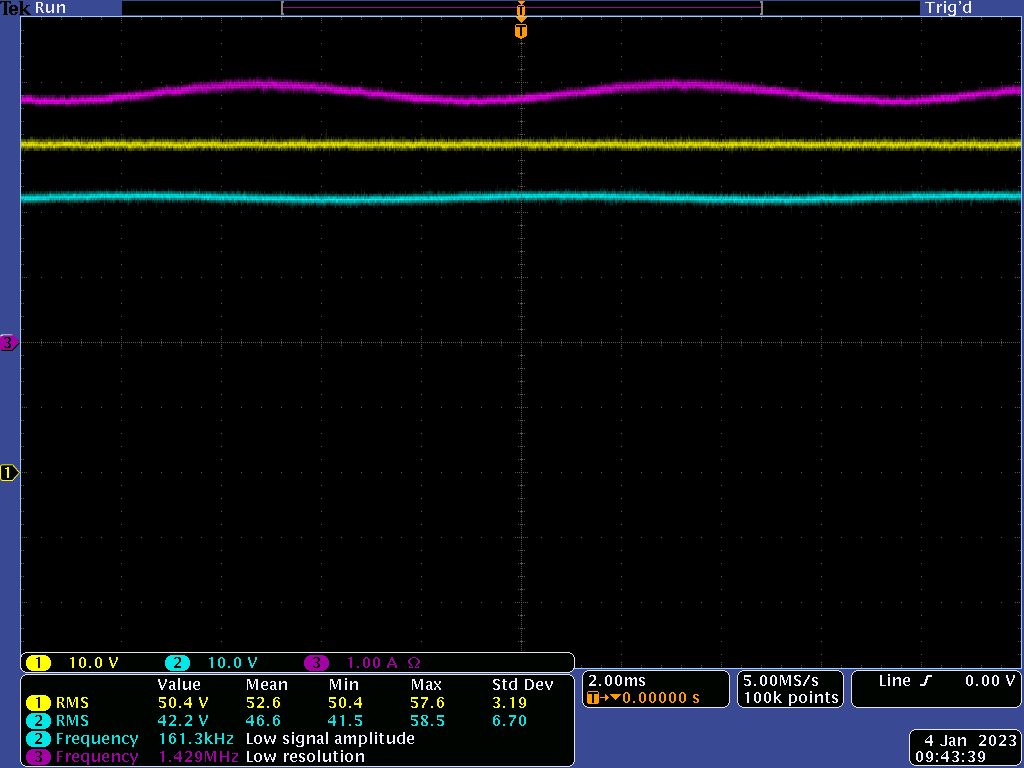
CH3 is the converter's output current - note that it is sinusoidal but Vin (CH1) to the converter is steady. Output power is ~ 160W.
This work shows that it is possible to implement a fast & stable analog MPP control loop that extends the capability of low-end, MCU, controllers. This scheme can be digitally enhanced by driving the circuit's Vref with a DAC output to vary the tracking value as well as an Enable feature for different modes of operation.
-
Closing the Loop (HW)
04/22/2022 at 21:21 • 0 commentsOne would think that the logical conclusion to this method is a hardware based approach. This log examines how it might work and what limitations apply.
![]()
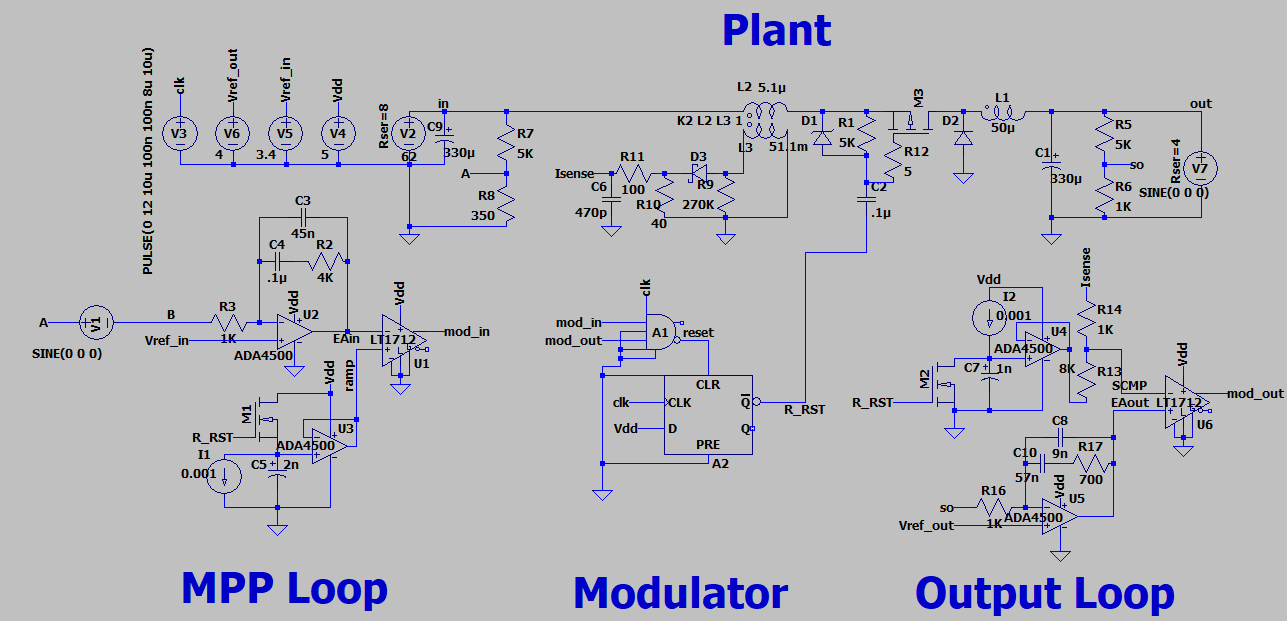
For simplicity, a buck converter with current mode control is used to model the MPP loop in LTspice. The current mode output control loop uses a linear ramp for slope compensation and a type-2 error amp to control output voltage. The comparator's output is gated to a flip-flop that drives the modulator and terminates the duty cycle.
The MPP loop uses voltage mode control, also with a type-2 error amp. A linear ramp, calibrated to the maximum duty cycle of the modulator, provides timing for a comparator to terminate the duty cycle.
The model includes voltage sources that can be modified to inject signals or transients to test stability and plot gain & phase margin. To measure gain & phase margin, comment out the '.tran' statement and set the 'parm t0...', '.tran', '.step', and '.measure' statements active. The frequencies to measure, and type of measurement, can be changed with the '.step parm Freq' statement. The sine voltage across nodes A & B must be set to 10mV and the variable {Freq} set in the 'Freq' field. Warning: the simulation can take hours, particularly at low frequencies. I believe that the linear ramps contribute to much of this.
![]()
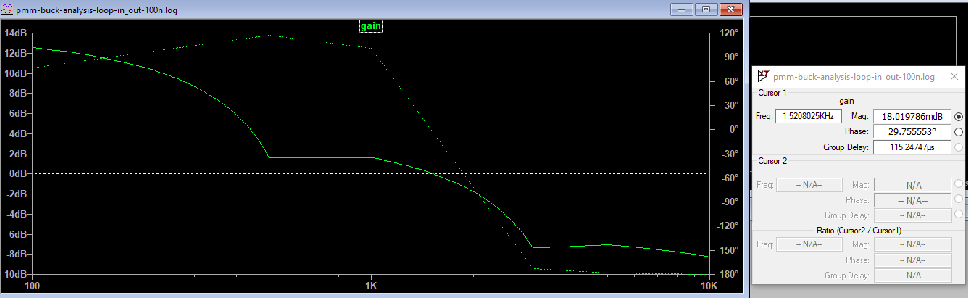
This gain & phase plot of the MPP loop shows a phase margin of just 29 degrees at a cut-off frequency of about 1.5kHz. Moving it down to 1.2kHz would likely get the phase margin up to a much safer 45 degrees. More could be done to increase phase margin and increase the cross-over frequency, such as resorting to a type-3 configuration. The input filter configuration for a given design will have significant influence on the bandwidth available for the MPP loop. For this simple buck with only bulk capacitance (no ESR is modeled) a single pole exists, so along with the error amp the maximum phase margin available is 90 degrees.
For the tightest MPP tracking the loop should be slightly faster than the output loop, but with such a low cut-off frequency this isn't possible. Minimally, the MPP loop should be faster than load induced ripple, such as that caused by an inverter (120Hz).
1.2kHz isn't fast for a SMPS control loop, but for MPP tracking it is likely fast enough to compensate for load induced ripple as well as environmental factors (e.g. shading, cloudy days, etc.). So, might it be better to stick with firmware? After all, it is easier to tailor the gain curve and add compensation for load, PV temperature, etc.
The answer is that it depends on how well MPP must be tracked. Matching a 1.2kHz hardware loop requires sampling at least every few degrees. Sampling every four degrees is 9.25uS or 110KSPS. The sample set must be integrated and anti-aliased; either substantial computational overhead for the MCU or handled by a DSP. Hence, demanding applications that choose a firmware approach will require a fast MCU (100MIPS) with DSP.
As previously shown, less capable processors can also use the firmware approach but must accept poor tracking in non-steady state conditions. Setting a MPP voltage range (as opposed to tracking a specific voltage) is a method for dealing with input voltage ripple induced by the converter design as well as load characteristics.
-
Closing the Loop (FW)
04/22/2022 at 19:38 • 0 commentsI developed this idea while finishing work on the DC-converter section of my Solar Charger project. I needed an MPP algorithm for the firmware and didn't want to adapt the work that I had previously done with my Prototype MPP Charger - too slow. But, like that prototype, the Solar Charger's converter also uses an 8-bit PIC running at a measly 4MHz which will make any form of a P&O algorithm too slow.
What if - instead of scanning for maximum power - the array's MPP voltage is maintained by the converter? For most PV panels, the MPP voltage does not vary significantly over temperature or load.
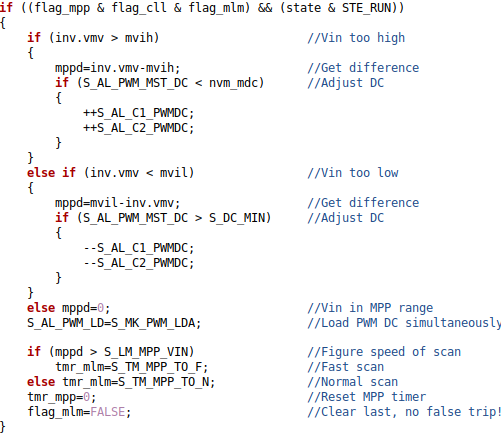
No scanning required! The converter's impedance is limited to maintain the MPP panel/array voltage. This is incredibly easy to do, even on an 8-bit PIC, and requires just 28 lines of simple C code. Here's the snippet:
The speed of this loop is controlled by a timer which is adjusted based on how far the converter's input voltage is from the MPP value. The converter's impedance is controlled by limiting the maximum duty cycle that the hardware control loop (to regulate the output) can demand. The two loops oppose one another but operate in tandem on the converter to form a closed loop. Note that in this implementation the MPP value is actually a range and not a singular value.
This method has proven much more effective than my prior implementations using P&O algorithms, but it is still too slow (it is executing on the order of 100's of mS to a second or two). The result is that the input voltage (e.g. array Z) still crashes during load transients or partial shading conditions (but recovery is much faster).
The variant pictured above executes in the foreground and there is room to go faster. This is ultimately governed by the speed of the infinite (I call it the RUN) loop, which would move its cut-off frequency to ~200-300Hz. You could go even faster by moving it to the background (ISR), limited only by processor speed and stable execution of other controller functions. With a faster processor, hardware equivalent performance may be achieved.
Hardware MPP Tracking
A Method for Hardware Based Maximum Power Point Tracking