 kutluhan_aktar
kutluhan_aktar-
11Building the Litter Detection Robot
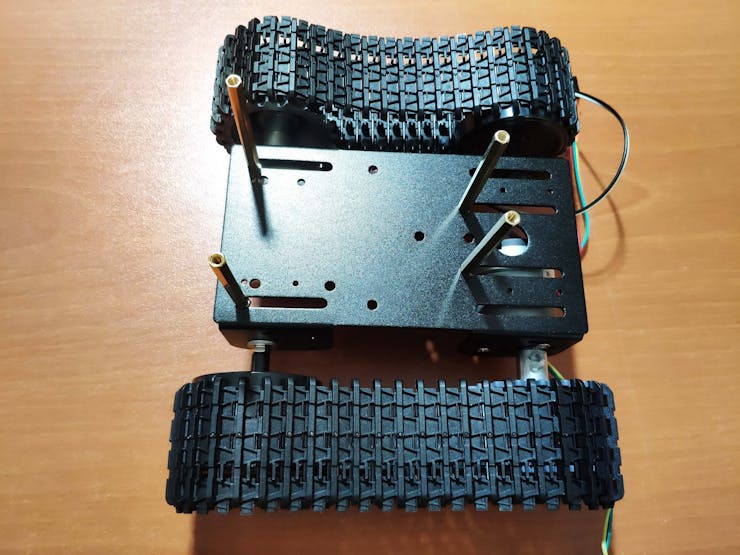
By utilizing male-female brass hex PCB spacers (standoffs), I attached the RPLIDAR A1M8 to the robot chassis. Then, I connected the L298N motor driver module to the Raspberry Pi 4 via its GPIO pins.
![]()
![]()
![]()
-
12Building the Litter Detection Robot
To supply the Raspberry Pi 4 and the L298N motor driver module, I used a Xiaomi 20000 mAh 3 Pro Type-C Power Bank. I connected a USB buck-boost converter board to the Xiaomi power bank to elicit stable 12V for DC motors of the robot chassis.
![]()
![]()
-
13Building the Litter Detection Robot
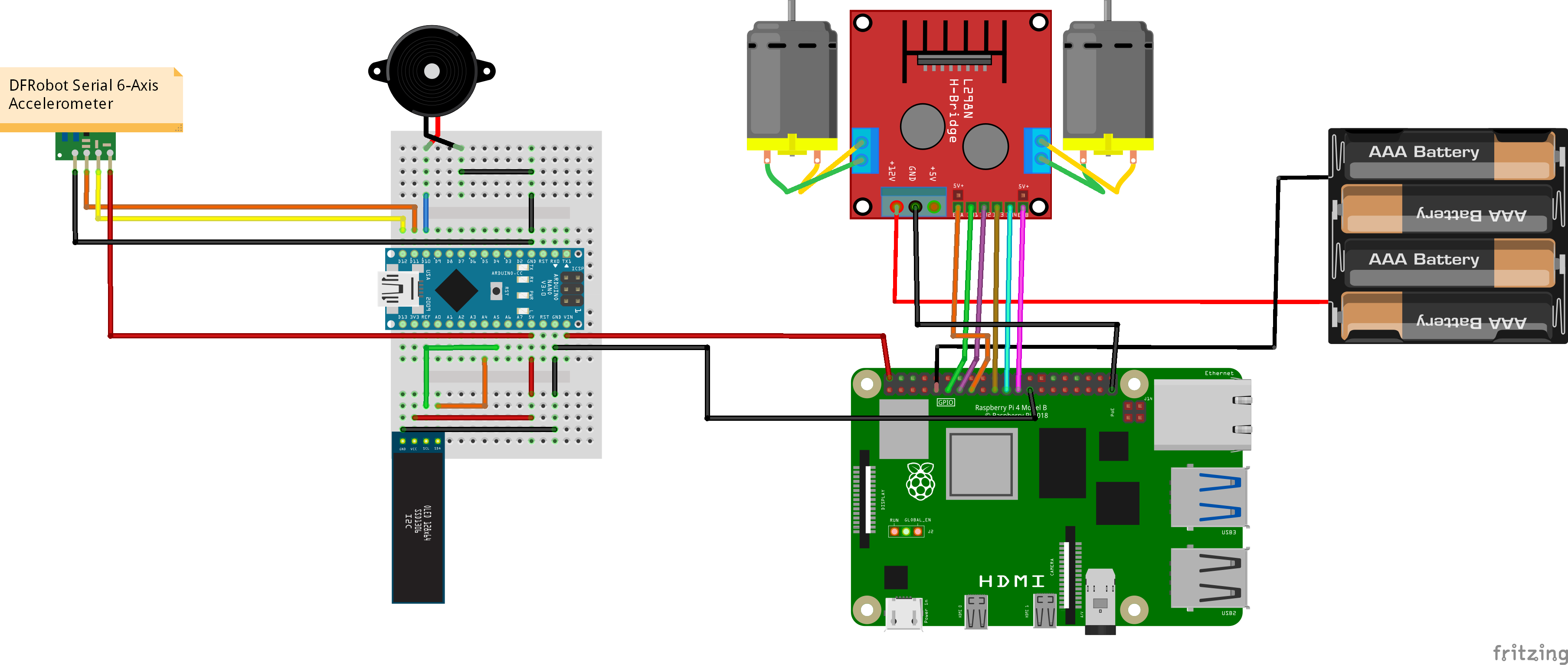
To build the fall detection system for the robot, I connected the DFRobot serial 6-axis accelerometer, the SSD1306 OLED screen (128x32), and the buzzer to the Arduino Nano. To supply the Arduino Nano, I connected it to the Raspberry Pi 4:
- Arduino Nano ➡ Raspberry Pi 4
- VIN ➡ 5V
- GND ➡ GND
![]()
-
14Building the Litter Detection Robot
Finally, I connected the USB webcam to the Raspberry Pi 4 and fastened all components to the robot chassis with a hot glue gun.
![]()
![]()
-
15Schematics
![]()
Autonomous Litter Detection Robot w/ Edge Impulse
Recognize and monitor litter with object detection via this self-driving robot. It also deploys a video stream and a fall detection system.







Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.