 selena1995
selena1995Supplies
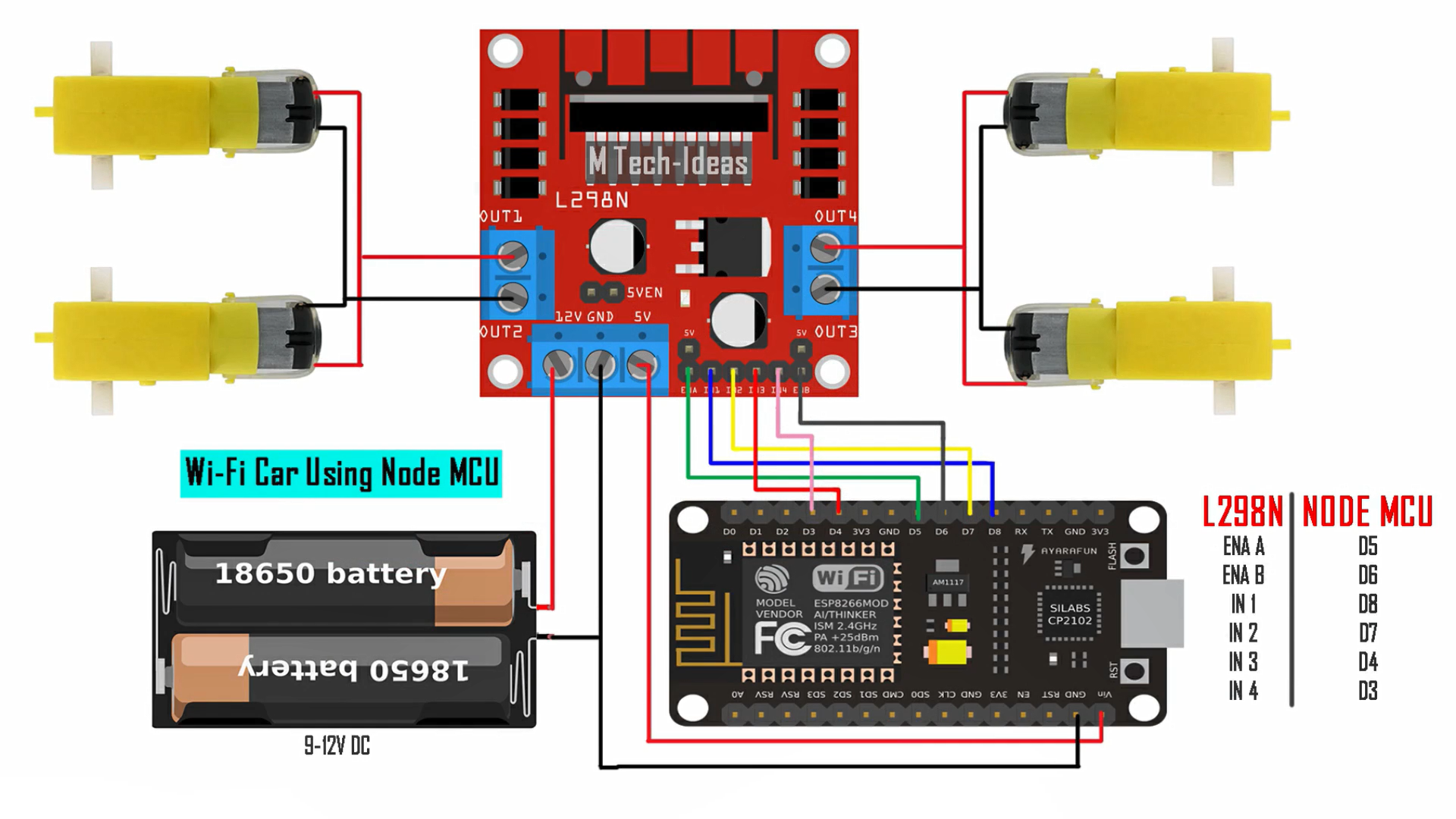
- L298N motor Driver:- To control the speed of the motors, here I have used the L298N motor driver. L298N is a very Low-Cost Motor Driver and you can also use it in various projects in the future. You can also found the library file for this motor driver easily.
- Chassis
- TT Gear Motor
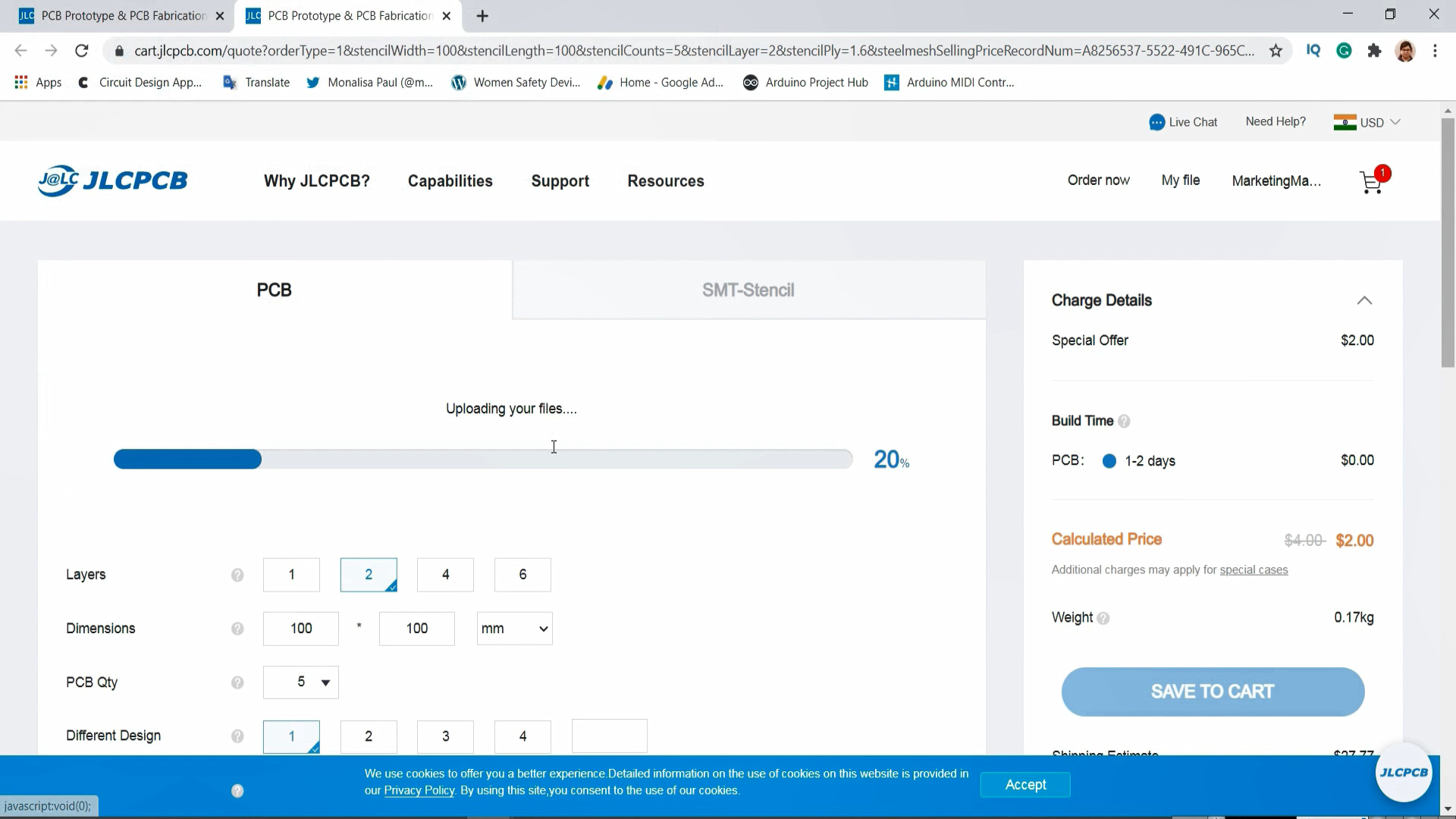
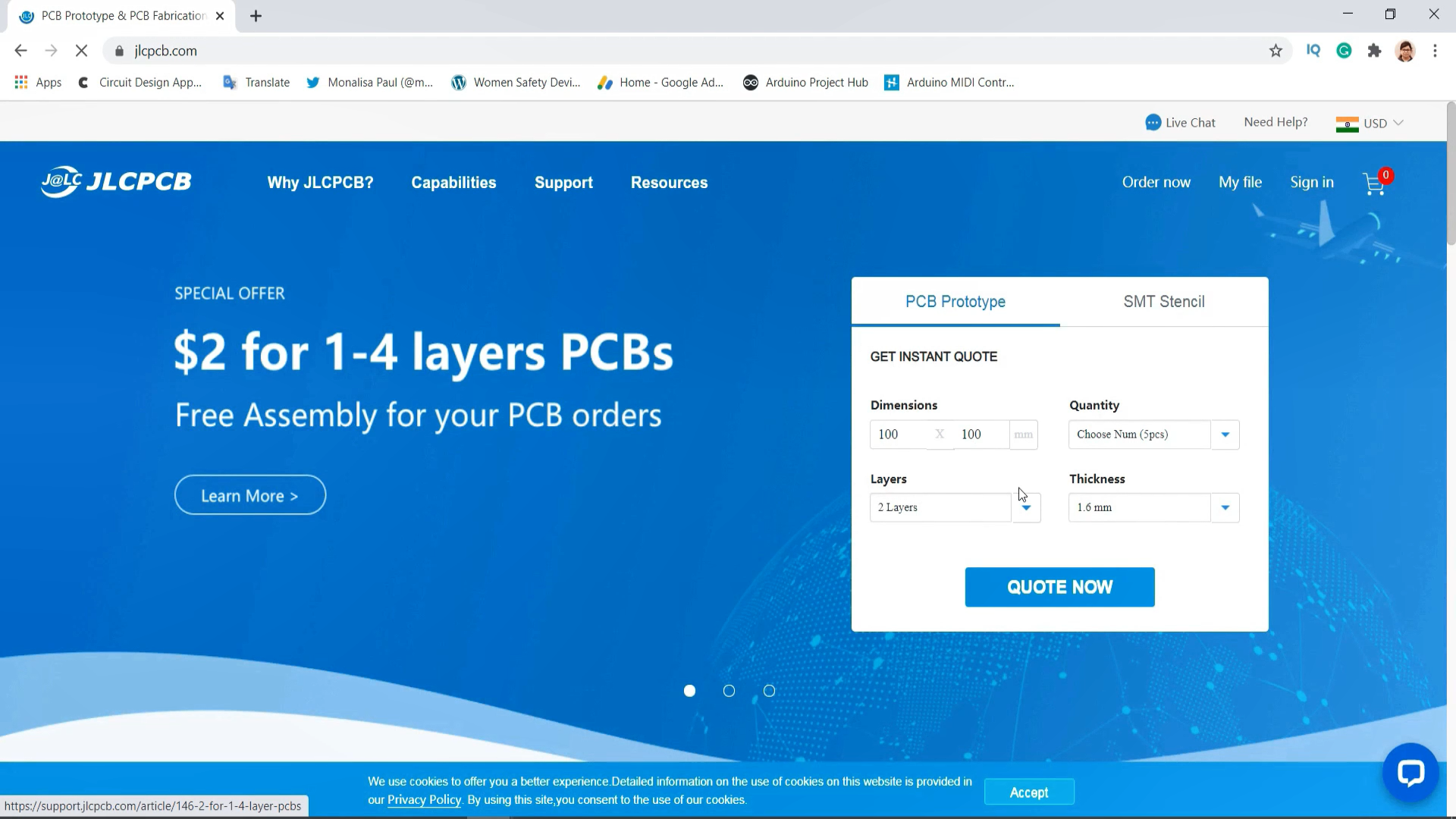
- PCB Boards By JLCPCB:- Then I have designed a PCB for NodeMCU. It will be easier to connect all the parts together with a PCB board.
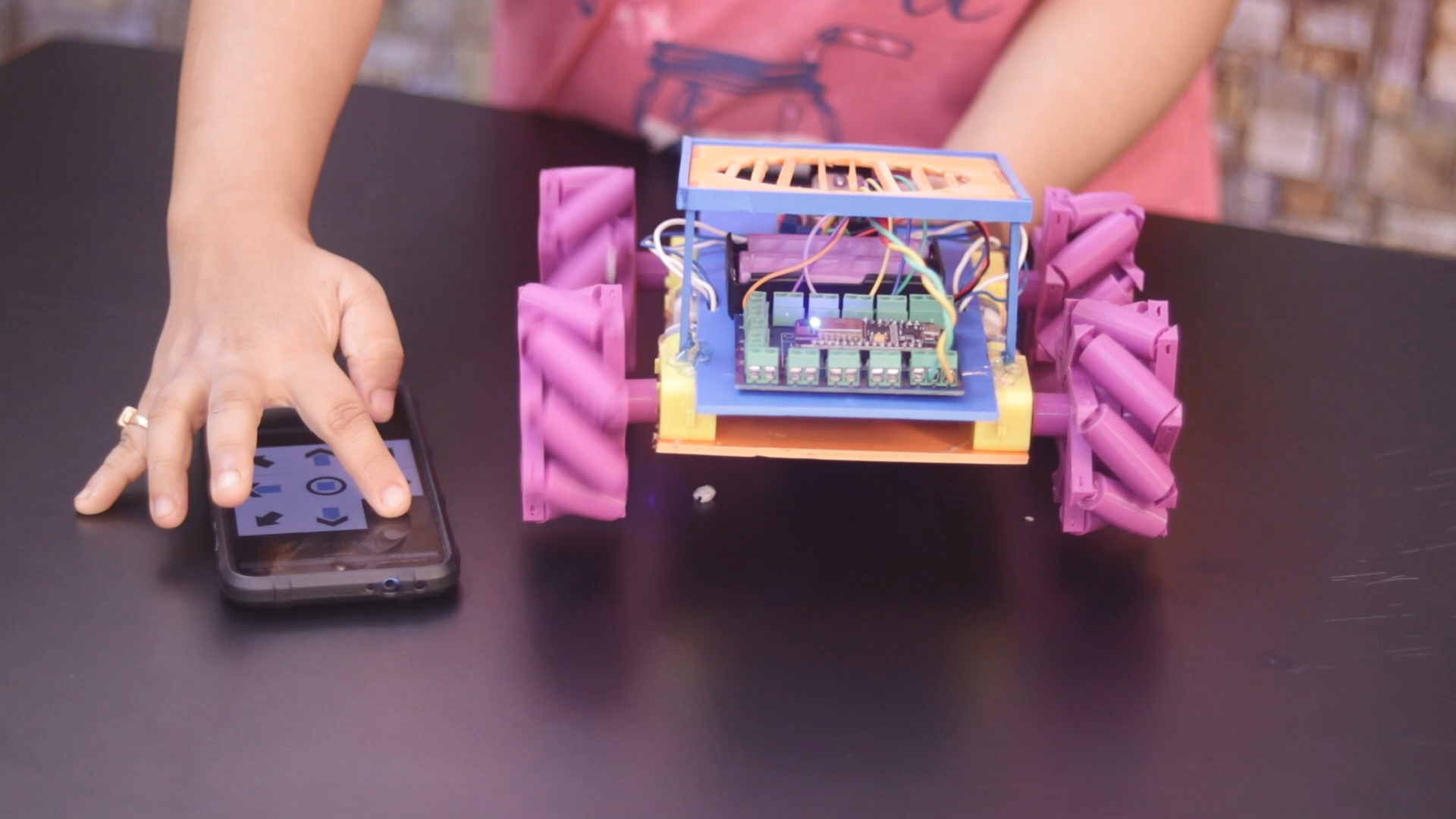
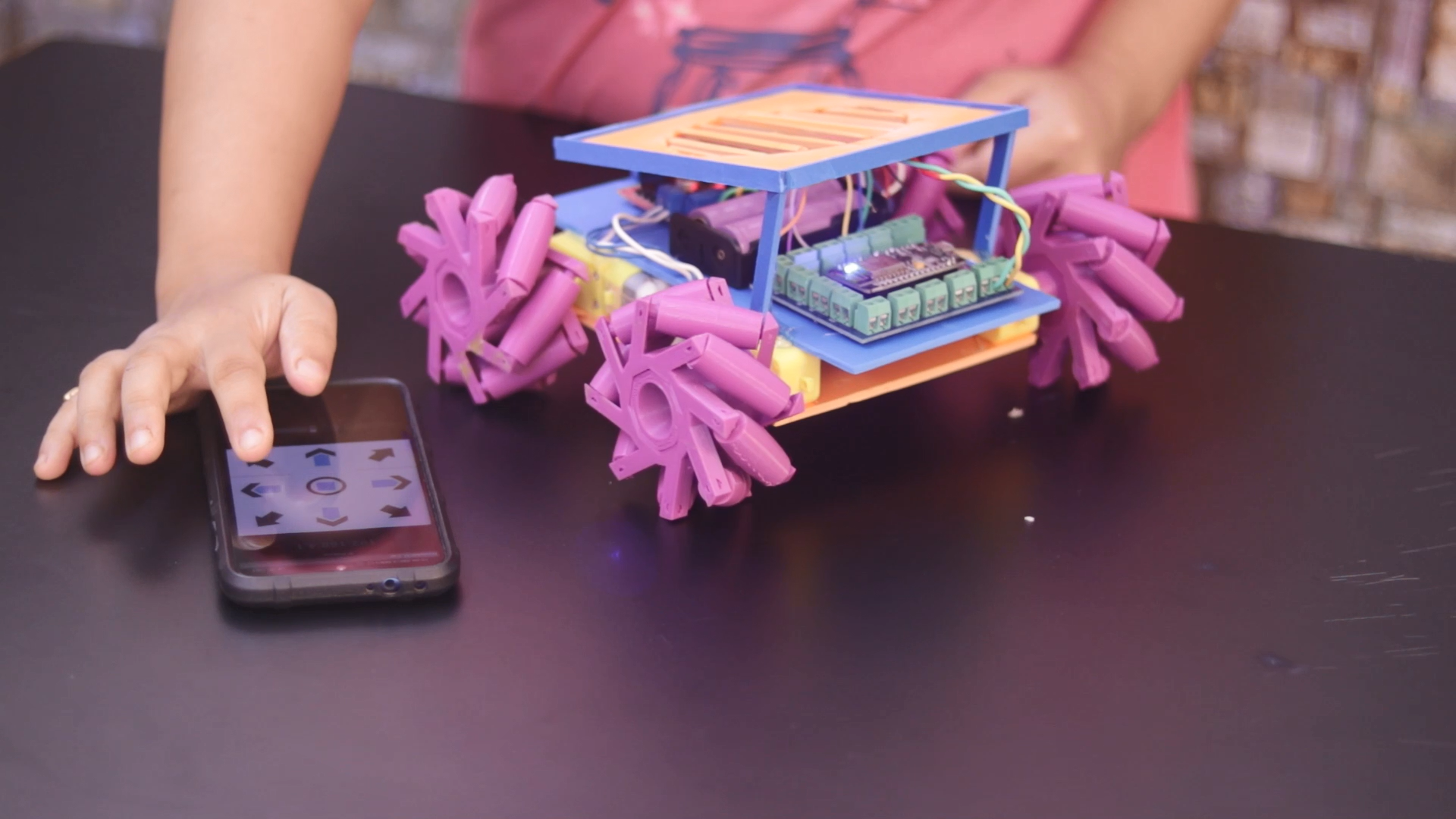
- NodeMCU:- Next, I am going to use NodeMCU to control the robot via WiFi. NodeMCU is a low-cost open-source IoT platform. It initially included firmware that runs on the ESP8266 Wi-Fi SoC from Espressif Systems and hardware that was based on the ESP-12 module. Later, support for the ESP32 32-bit MCU was added.
Here I have used PVC SHEET to make the chassis. To give it a proper shape, you can use a hot airgun to apply heat. Then you can use a Drill machine and Cutting tools to makeover it. Here I have chosen a simple design but you may choose anything else according to your need. Once your Chassis is ready, attach the TT gear motor with it using Hot Glue and anything else you want. Here I have used 60 rpm TT Gear Motor.
Connection\






 Shuang Peng
Shuang Peng
 Tamandutech
Tamandutech
 CiferTech
CiferTech
 Simone Tolomei
Simone Tolomei