0%
0%
Hexapod Of Pathetic Engineering (HOPE)
This is my first attempt at making a multi-legged insect inspired robot. I hope to use HOPE as a learning vehicle to a larger bot project.
 Neuntoter
NeuntoterBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Fabio Vezzari
Fabio Vezzari
 Anthrobotics
Anthrobotics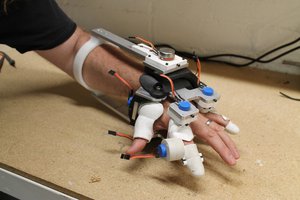
 Brian Poor
Brian Poor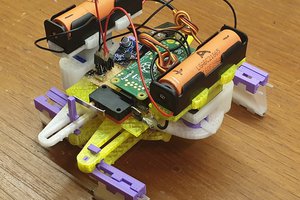
Can't wait to see what you come up with.