 Jacob David C Cunningham
Jacob David C Cunningham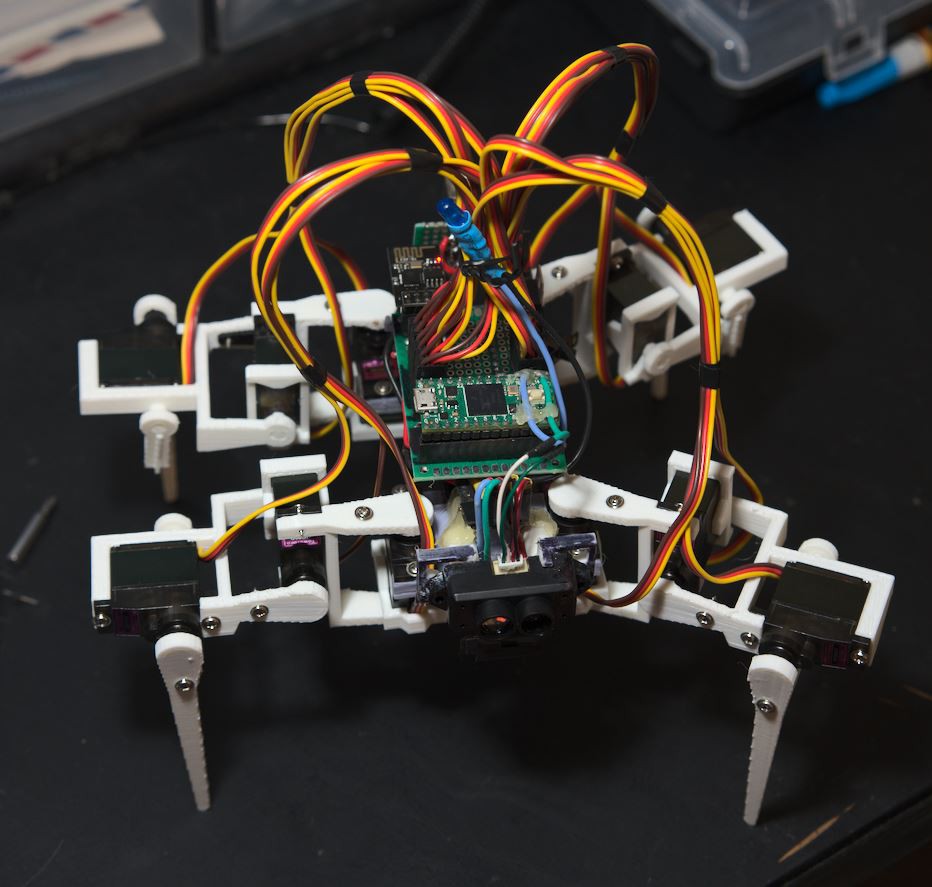
Since the MG90D's are taller than the blue 9g servos, I have to update the design and reprint ALL of the leg joints... I considered making the outer joint be able to swing all the way around the middle joint but I don't think there's much to gain in doing so. Also extending that would change the gaits. So in order to not affect the gaits, I will just extend the bases.
Thankfully most of the dimensions are the same though, so it's really just a height mismatch. I also had to update the servo boots since the wires are flush with the base of the servo for the MG90D.
It'll take me a few days to print these (starting 07/26). I'll just run the prints after work.
Print times (x4)
- servo boot 30mins (x2)
- inner joint 46mins
- middle joint 60 mins
- outer join 51mins
So it's about 3.5hrs per leg or 14hrs total
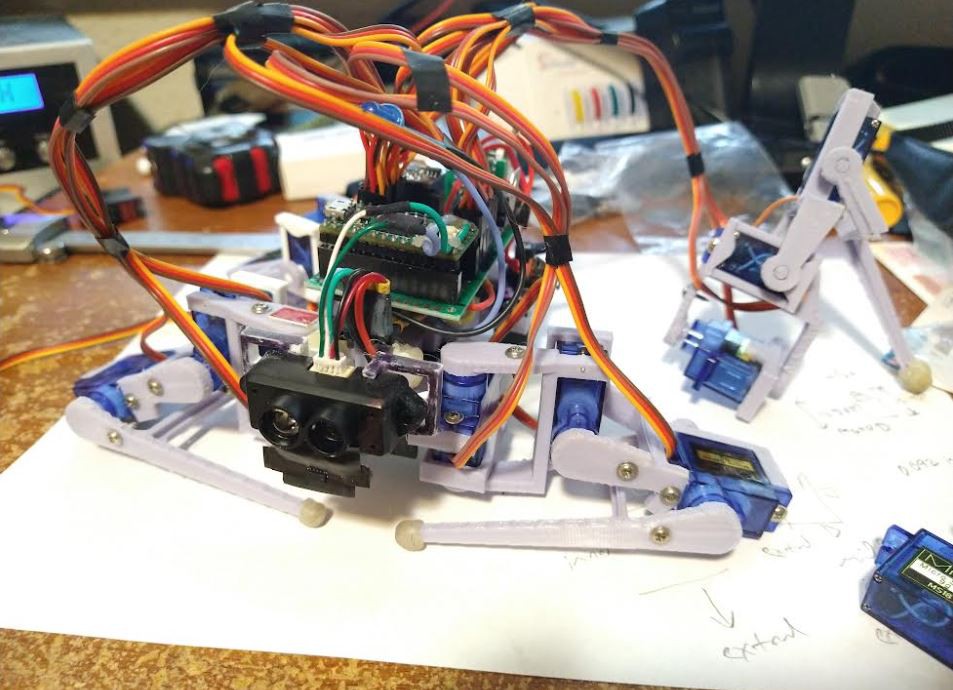
Patiently waiting for new legs
Got one... already the servo positions changed, will need to check the gaits again
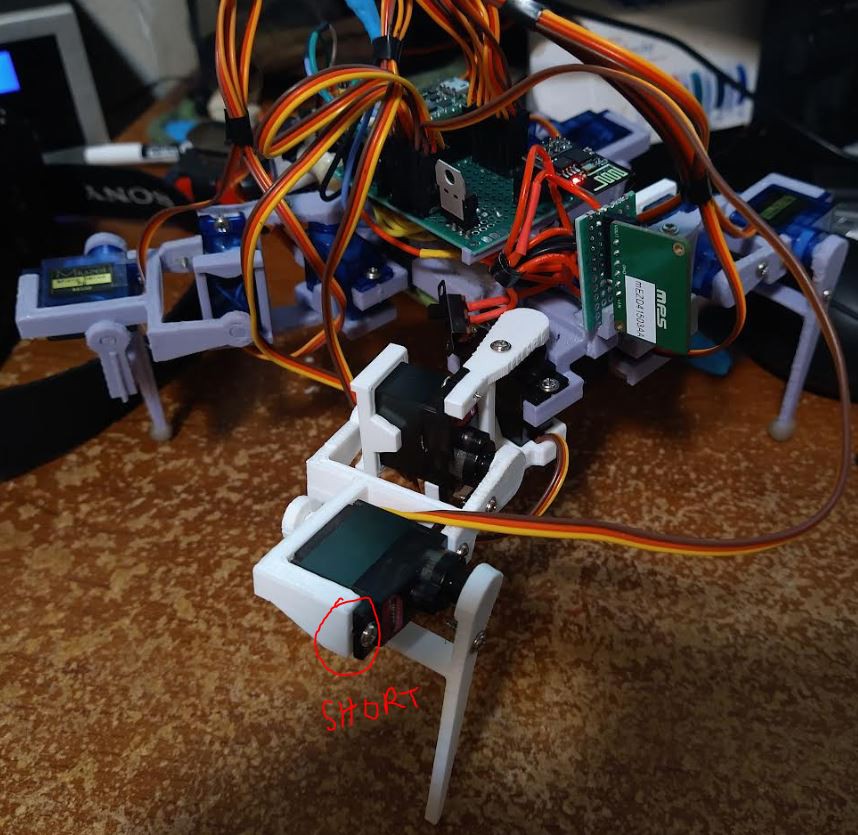
This particular leg is short that area circled in red. But I updated the rest. I was having problems with the measurements because the servo horn on the MG90D is not flush like the blue servo. So it adds extra height, and the case of the MG90D is also a little taller. I will get this done by Friday night and then I can build the floating sensor assembly project over the weekend.
Thursday 07/28/2022 it's done
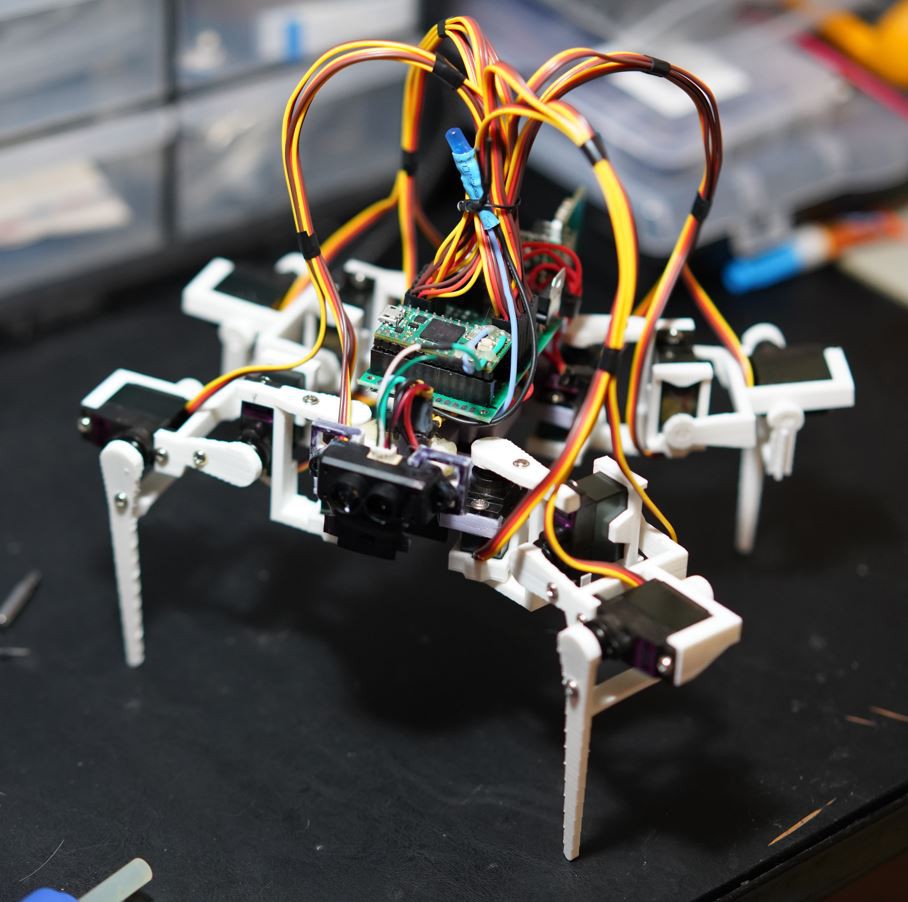
Bad focus here, still a photography noob.
I need to reprogram it all again, since the servo starting positions changed and I have not finished that abstracted gait mod.
But man... it's so stiff and stable, I'm pumped. Worth it. It's crazy like I'm not even sure if it's on because the servos don't make any sound/barely deflect from the weight of the robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.