 Jacob David C Cunningham
Jacob David C CunninghamLife Aquatic quote
TLDR;
started working on this again, no real progress yet on improved navigation
So... I think I had a burnout moment, I could not do anything "productive" for about 3 weeks. But now I'm back!
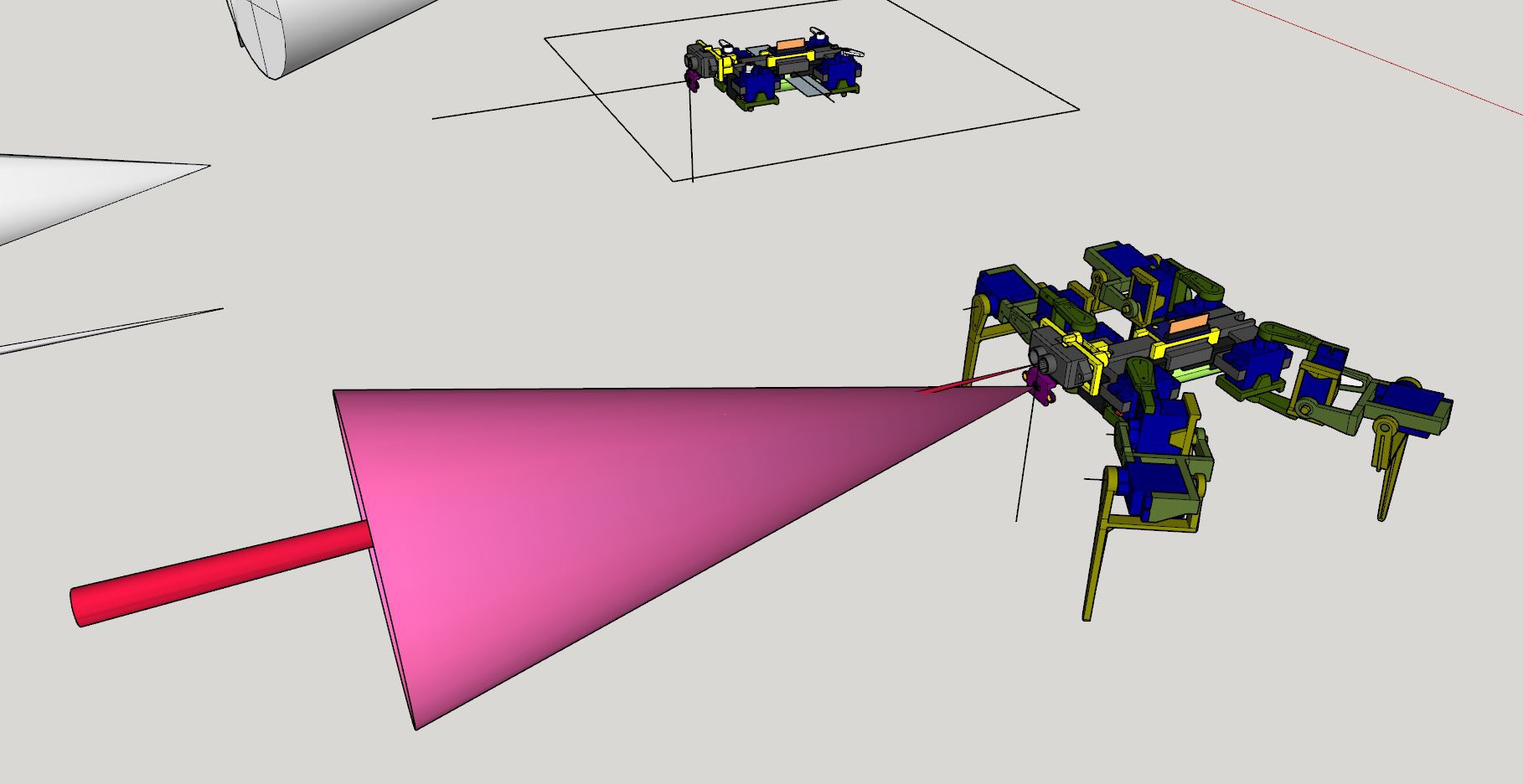
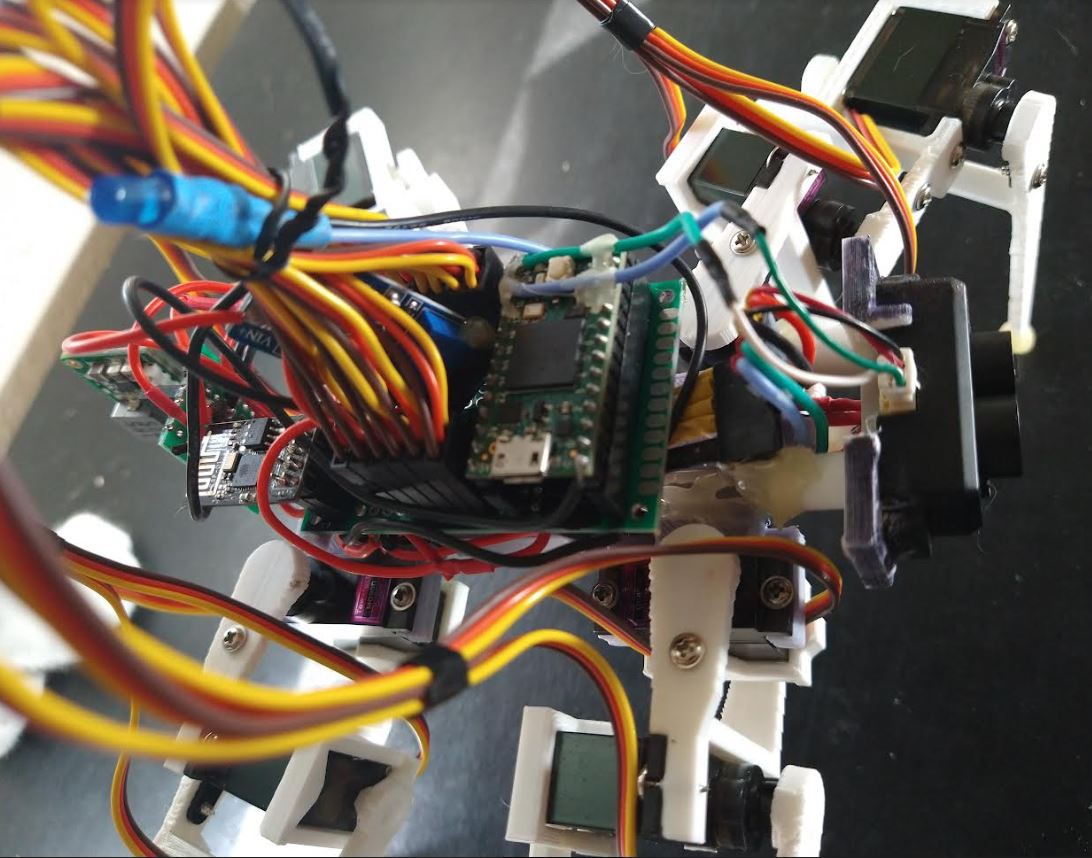
To recap, the Twerk Lidar Robot (TLR) used to have just one power supply for everything... and so when the power spiked/got too low, the Teensy 4.0 would die, which is the robot brain. After adding on a second power supply (both using same battery) that currently is only for the Teensy, this helps it greatly. Now this means if it runs into a wall, it probably won't die from a current spike, rather it will die from destroying itself. So now the navigation has to be good.
I've just been working on random stuff but I think it's time to start putting it together. One unfinished aspect is the long-scan data send... which sends a lot of data through my janky polling serial websocket connection. It has no data-send-acknowledgement so if the data is not completely sent it's wasted effort due to not being able to plot/use the transmitted data.
The other issue is the TFmini-S takes longer to take a sample than the purple sensor. But the single-point "lidar" is more accurate/narrower beam. So I still want to use it.
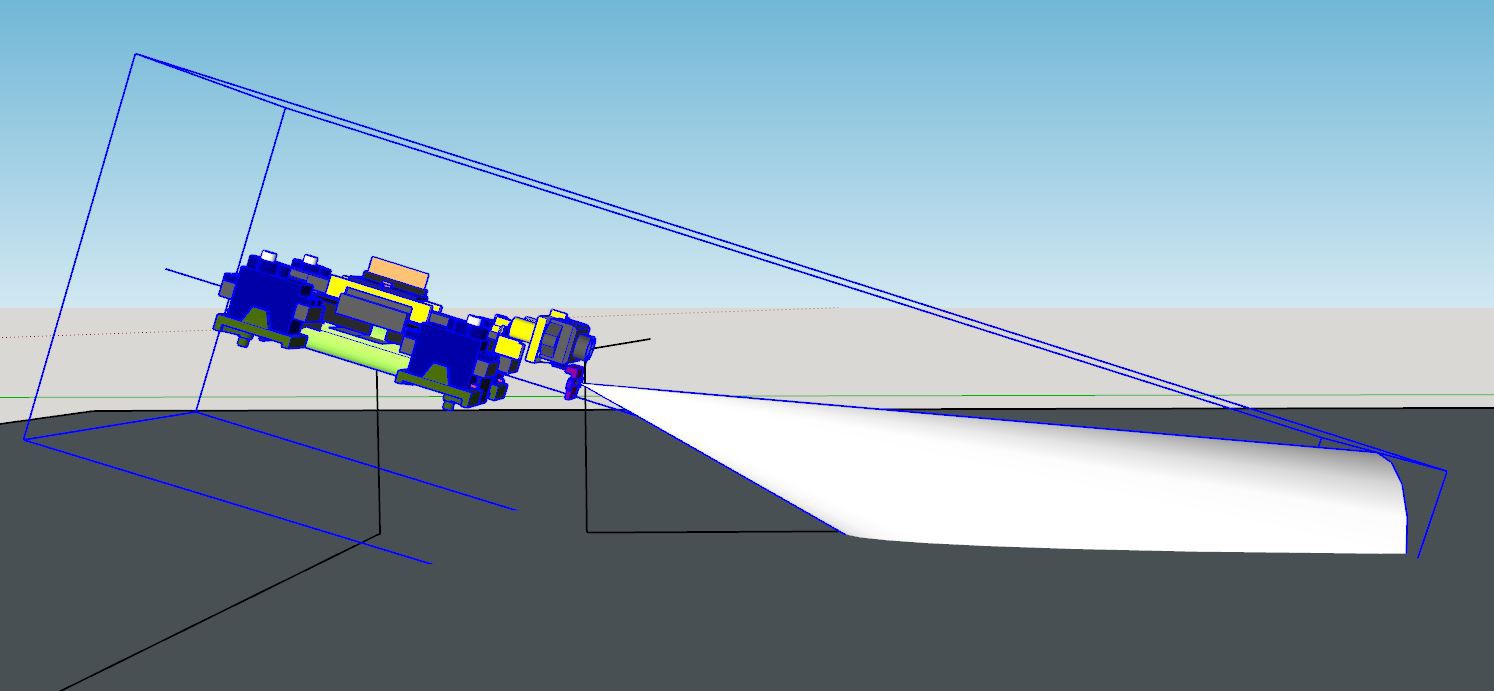
With all of that in mind, the work for today will be to come up with a robust navigation system.
The other issue is no multi-tasking... what I can probably rely on is the CPU speed since it is insane eg. 600 MHz.
I forget how much electronics is on this thing.
Long video
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.