 Petar Crnjak
Petar CrnjakThe goal of this project was to create wireless IMU devices that would be primarily used to control robotic arms and also have haptic feedback.
It uses an ICM20948 sensor that has an embedded sensor fusion algorithm that simplified the development of this device. The output of the sensor fusion is quaternions that represent rotation.
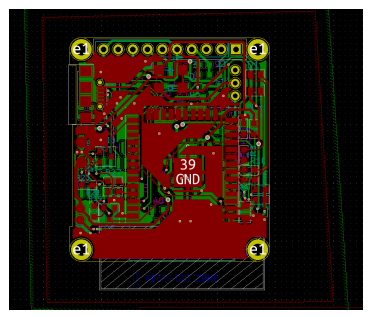
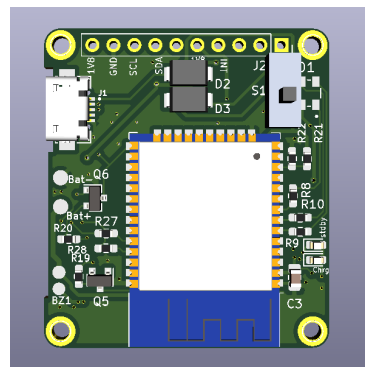
PCB Layout
Schematic
RTOS
Mistakes
 Dylan
Dylan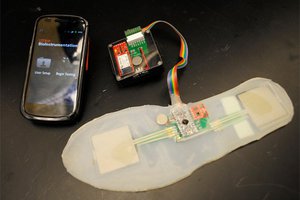

 Curt White
Curt White
 Andrew Lamchenko
Andrew Lamchenko