 kelvinA
kelvinAI went into powerpoint and roughly drew what lines my fingers took, and where. Then I lined it up in Fusion 360 and the angles match what I expected when I proposed this new TimerSpy solution.
 The assumed plan was for Finger2-4 to be 6mm lower than 1/5, but I've just tried it (by using my other hand as a spacer) that the inverse feels much less constricted.
The assumed plan was for Finger2-4 to be 6mm lower than 1/5, but I've just tried it (by using my other hand as a spacer) that the inverse feels much less constricted.As you should be able to see, the reason for the thinness is because I was planning to extend Finger2-4 under Thumb1 and have the motor block on the other side.
It does seem like things are still going to be a tight fit between Tetrinsics though, but at least this layout idea doesn't need to be fully 3D printed to get an idea of the fit.
The main issue right now is that it's too large to neatly fit on the back of my hand. Most of the reason is because of Thumb1 though.
Now I've done some more repetative motions and it's mostly OK other than Finger4 which wants a different angle for some reason.
 I'm just going to have to hope I get used to it and that the spacer does its second function of allowing the chain to "lean" on it.
I'm just going to have to hope I get used to it and that the spacer does its second function of allowing the chain to "lean" on it.It's also interesting to see that all fingers, even Finger5, can do 32mm of travel perfectly fine.
After tweaking the Thumb1 Tetrinsics location, it's starting to seem like I could just about fit everything on the same plane.
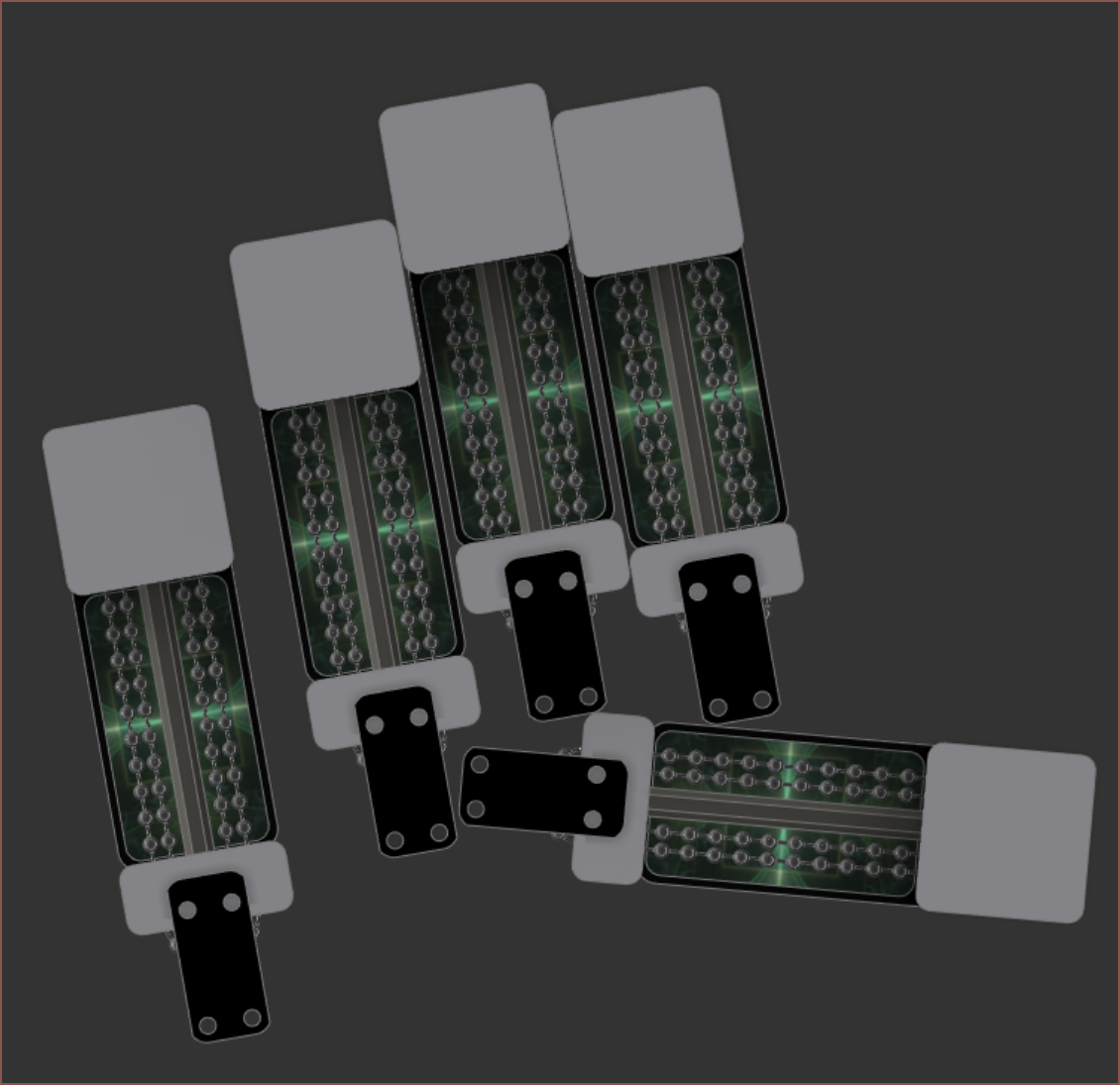 And this is starting to look kinda cool actually, like robotic hands:
And this is starting to look kinda cool actually, like robotic hands: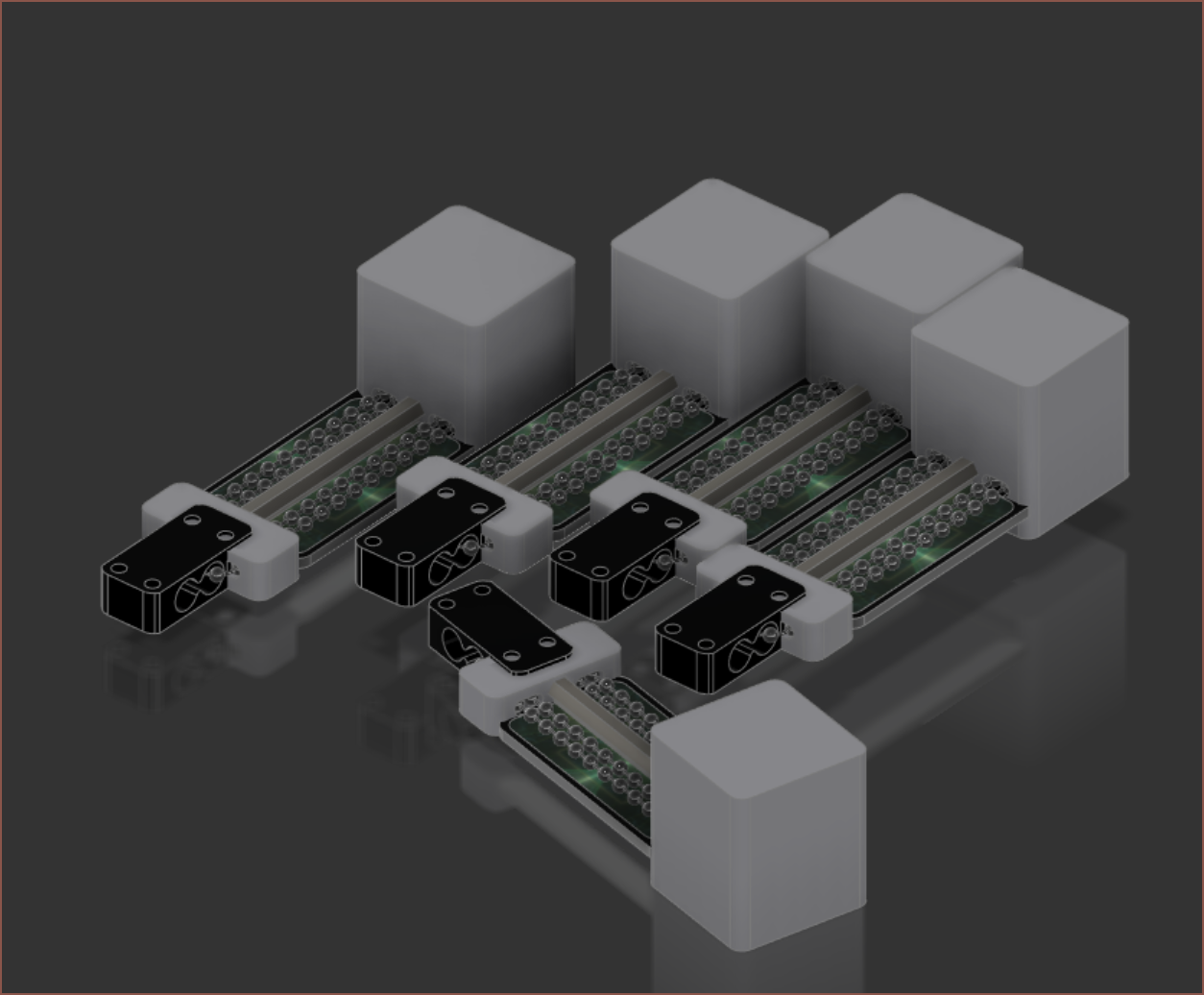 Brass' natural colour does seem to break the vibe a bit though.
Brass' natural colour does seem to break the vibe a bit though.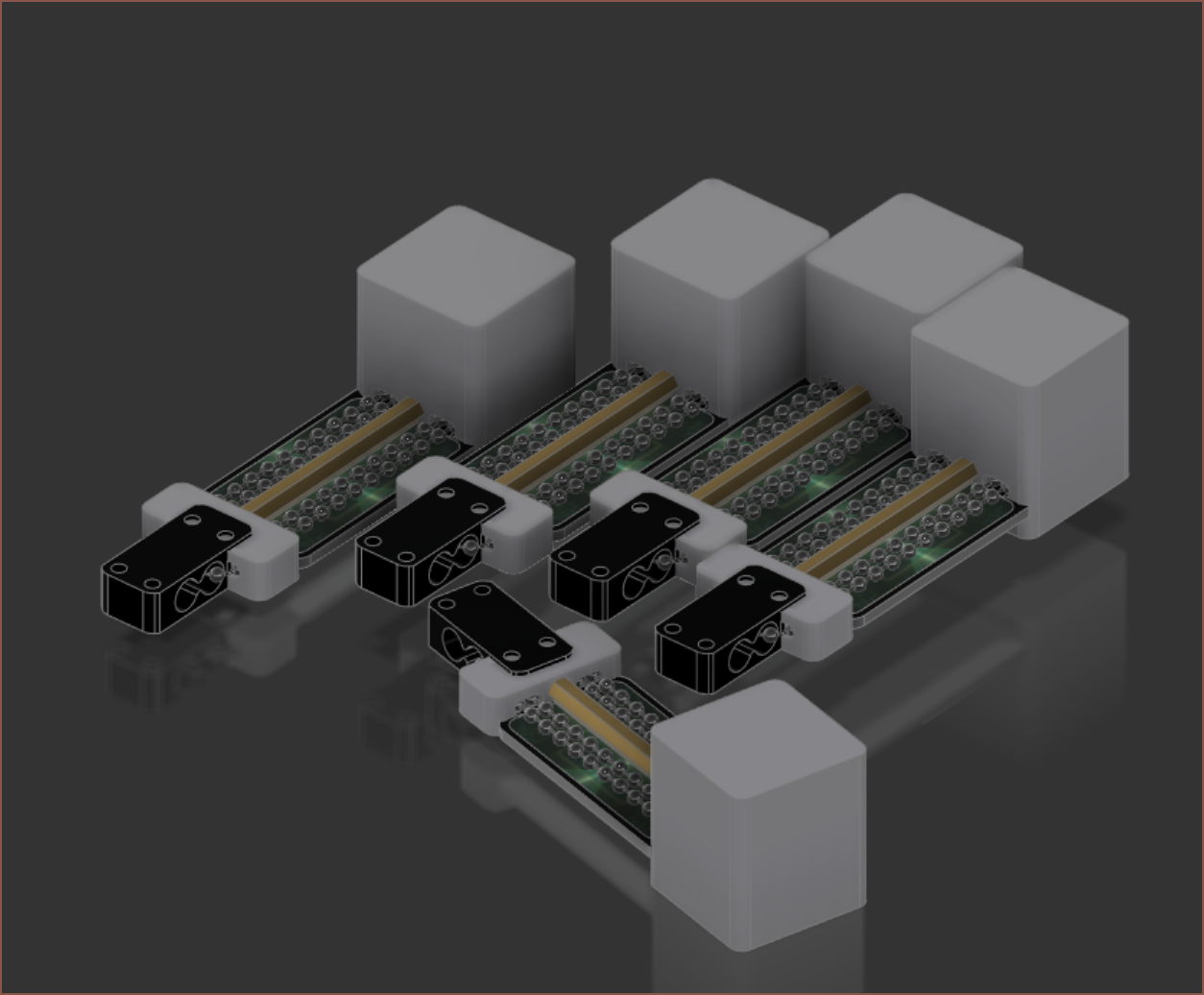
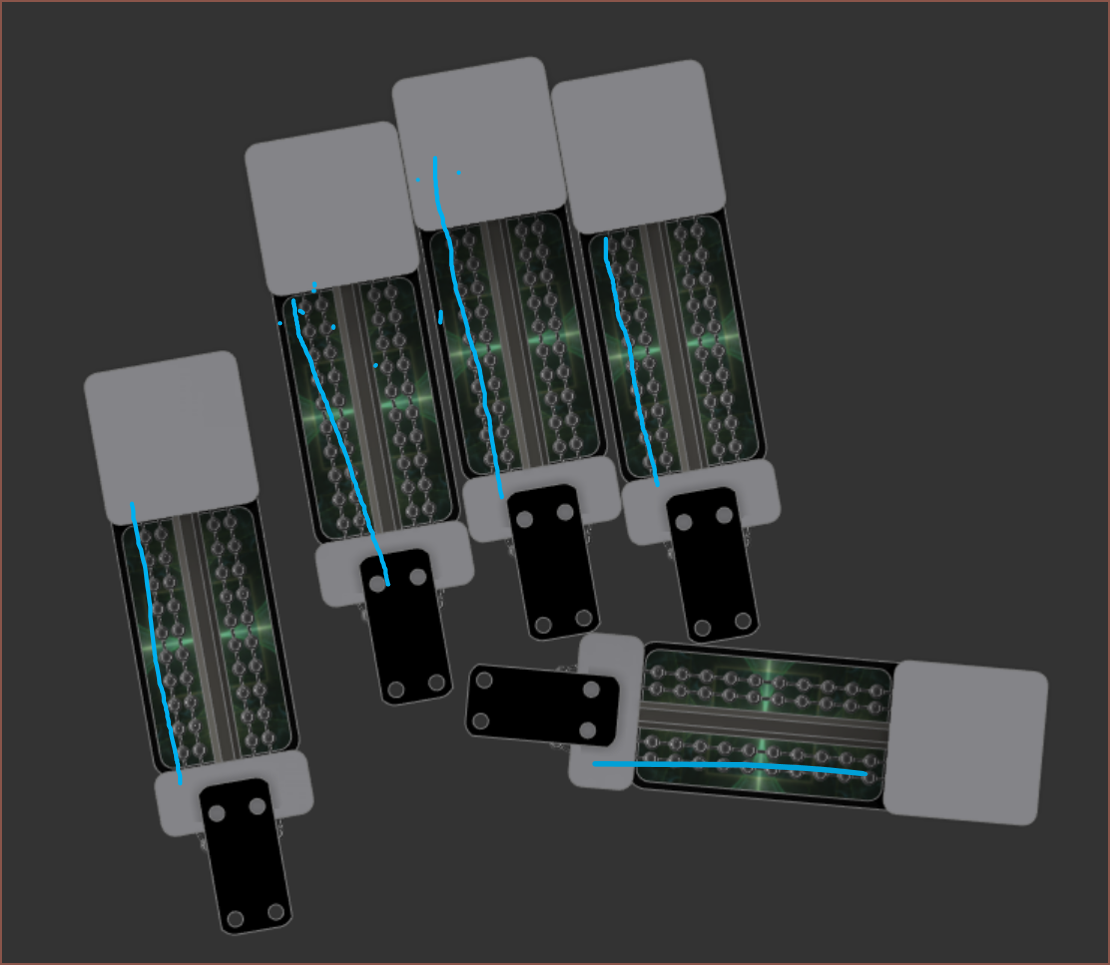
Looking at the layout again, and trying it, I've moved Finger4 up. Looks a bit tidier too.

I have a feeling that these would make passable haptic gloves for limited MR scenarios. Like, it won't feel as free as actual gloves but the gestures performable on this could be intuitive.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.