 kelvinA
kelvinAhttps://www.instructables.com/Strong-Worm-Gear-on-3d-Printer/
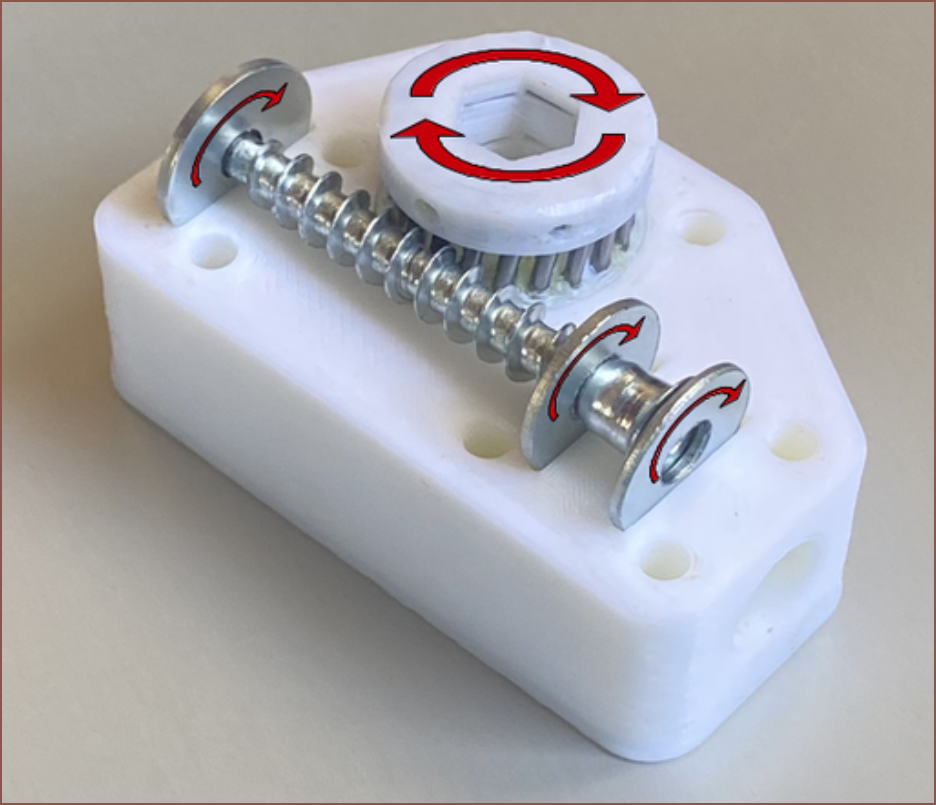
I just found this. I might not use it because it's a 20:1 and so could be quite slow (but if I can get 60rpm with decent acceleration, I wouldn't mind).
Currently, my plan is to have a curved GT2 rack and drive a closed belt.
 While this method means that I may not have to worry about backlash, I am still worried about effective torque and elasticity in the axis. Using a large width of belt will mitigate the latter, but if I recall correctly, I'm using a 16T to 60T, meaning 3.75:1 reduction on a standard 40Ncm Nema17. I was planning to counterbalance it, but that currently sounds like it would add complexity to the design and the installed tools would likely have different weights.
While this method means that I may not have to worry about backlash, I am still worried about effective torque and elasticity in the axis. Using a large width of belt will mitigate the latter, but if I recall correctly, I'm using a 16T to 60T, meaning 3.75:1 reduction on a standard 40Ncm Nema17. I was planning to counterbalance it, but that currently sounds like it would add complexity to the design and the installed tools would likely have different weights.Going cyclodial is probably the route out of this situation, but I thought the DIY worm gear looked cool so I wrote this log.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
That's an interesting gear design for sure. Similar to a rack and pinion, but on its side, and curved?
Are you sure? yes | no
This is where I got the idea from: https://www.youtube.com/watch?v=2YC-0C8oPUo
In looking for that video, I just found this other one: https://www.youtube.com/watch?v=bgQDu1jSufk
Are you sure? yes | no
I am surprised the belt stays engaged with the outer circle in that first video. I'm not sure why it doesn't take the shorter direct path. It looks really cool, though!
Are you sure? yes | no