 Awesome Makes
Awesome MakesWe designed and assembled an extending platform that will be used to pick up the pallets. It took some iterations.
We first used a 28BYJ-48 stepper motor to drive the platform but found it too slow.
We then switched to a continuous servo. That worked better than the stepper motor but now we had no control over positioning of the platform. We first tried to solve this by using an ACS712 current sensor. This sensor would measure the current used by the servo. When the platform reached its end position the current draw would increase. This was fun to play with but could never work. Firstly, this way we would not be able to return to the ‘home position’. Secondly, when the platform would pick up a container the current draw would also increase making it difficult to callibrate.
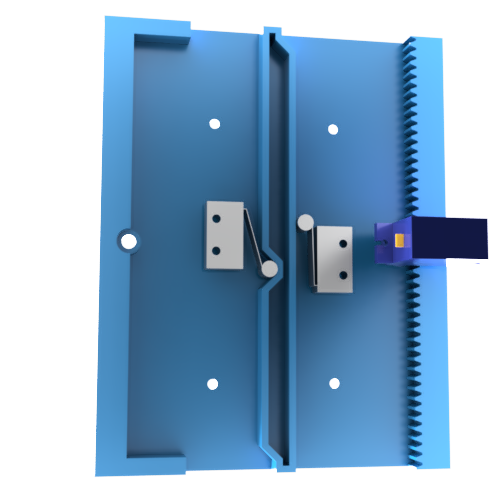
Finally we settled on using a combination of the continuous servo and limit switches. The limit switches have a roller on the end. This roller rides on a track and the track has some recesses.
The video below shows the first test of the platform. We wrote some simple arduino code to control the platform using the serial monitor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.