0%
0%
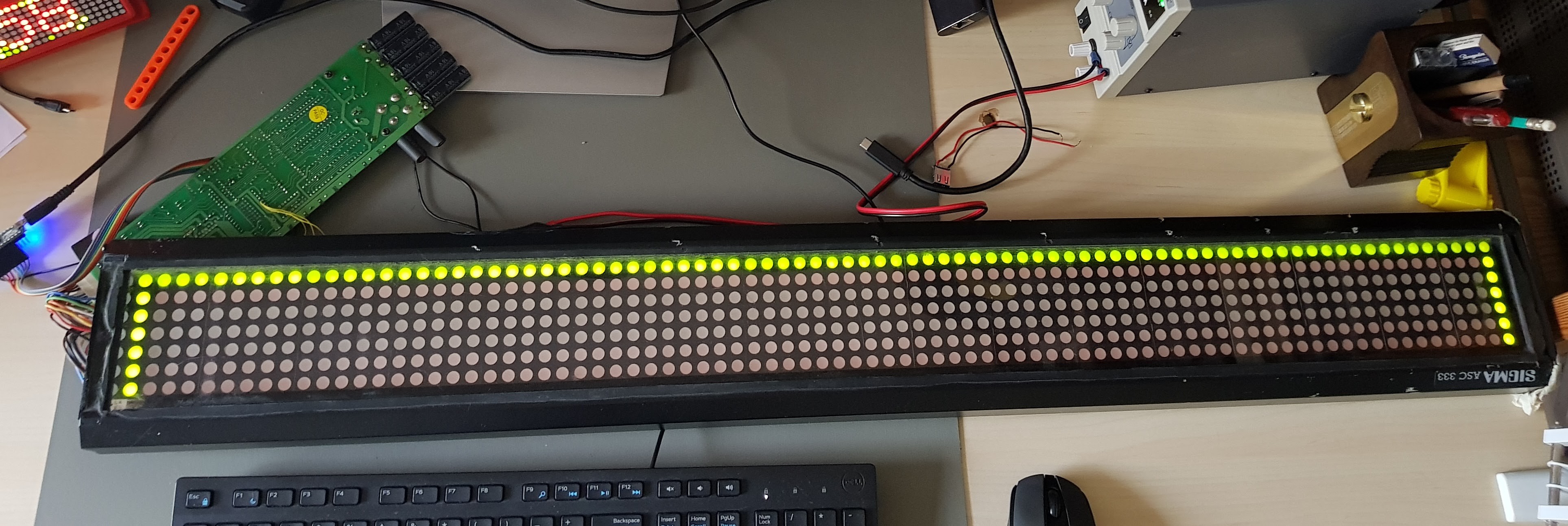
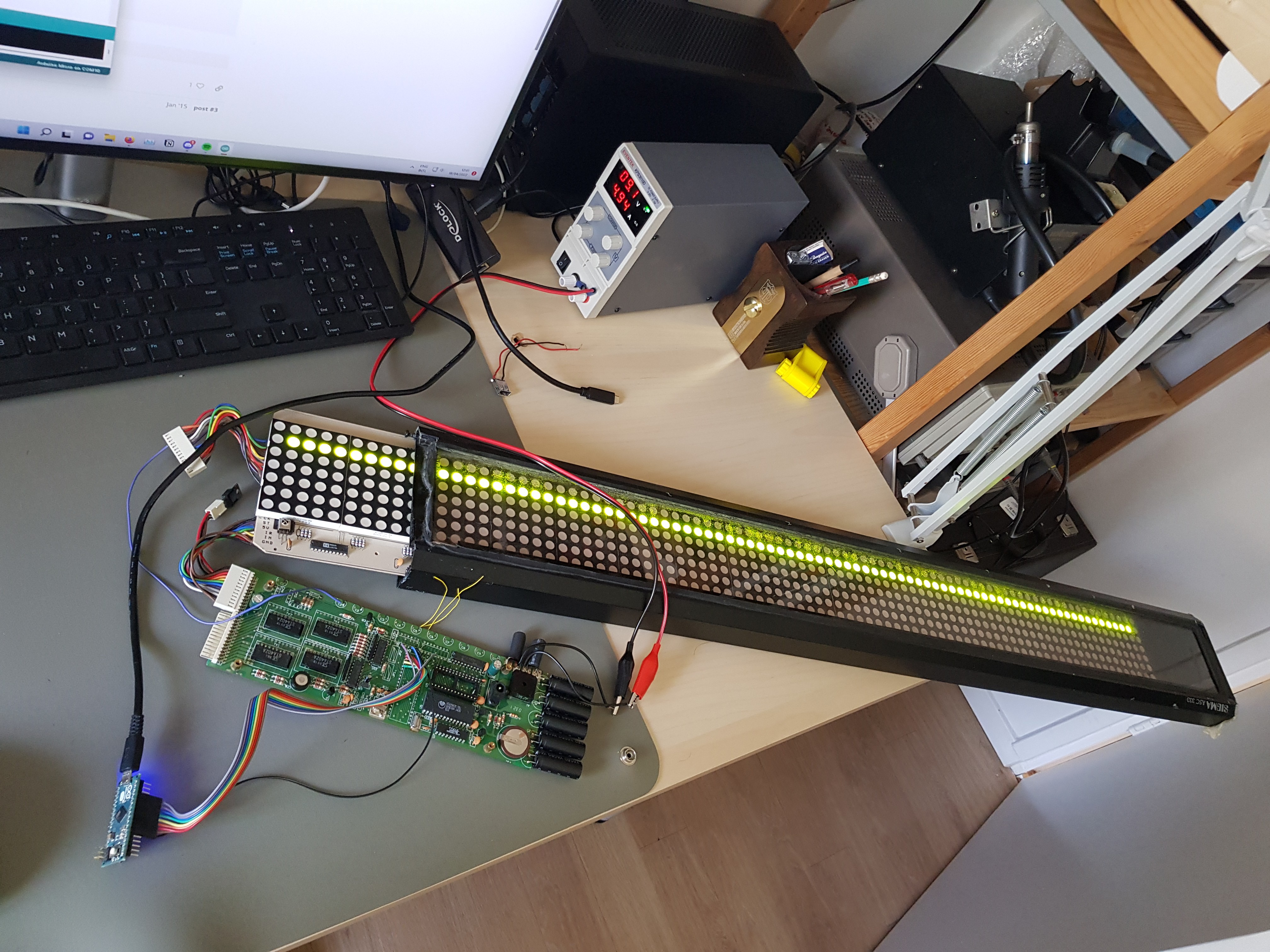
Twitter feed on an old LED marquee
An adventure in '80s electronics and embedded Linux
 Enrico Gueli
Enrico GueliBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 George Albercook
George Albercook
 engunneer
engunneer
👍 I'm always interested in old displays, so looking forward to photos from you as there are few online. My search turned up this write-up in Dutch: https://revspace.nl/Lichtkrant_Sigma_ASC_333 which you have probably found too.