 badr tharwat
badr tharwat-
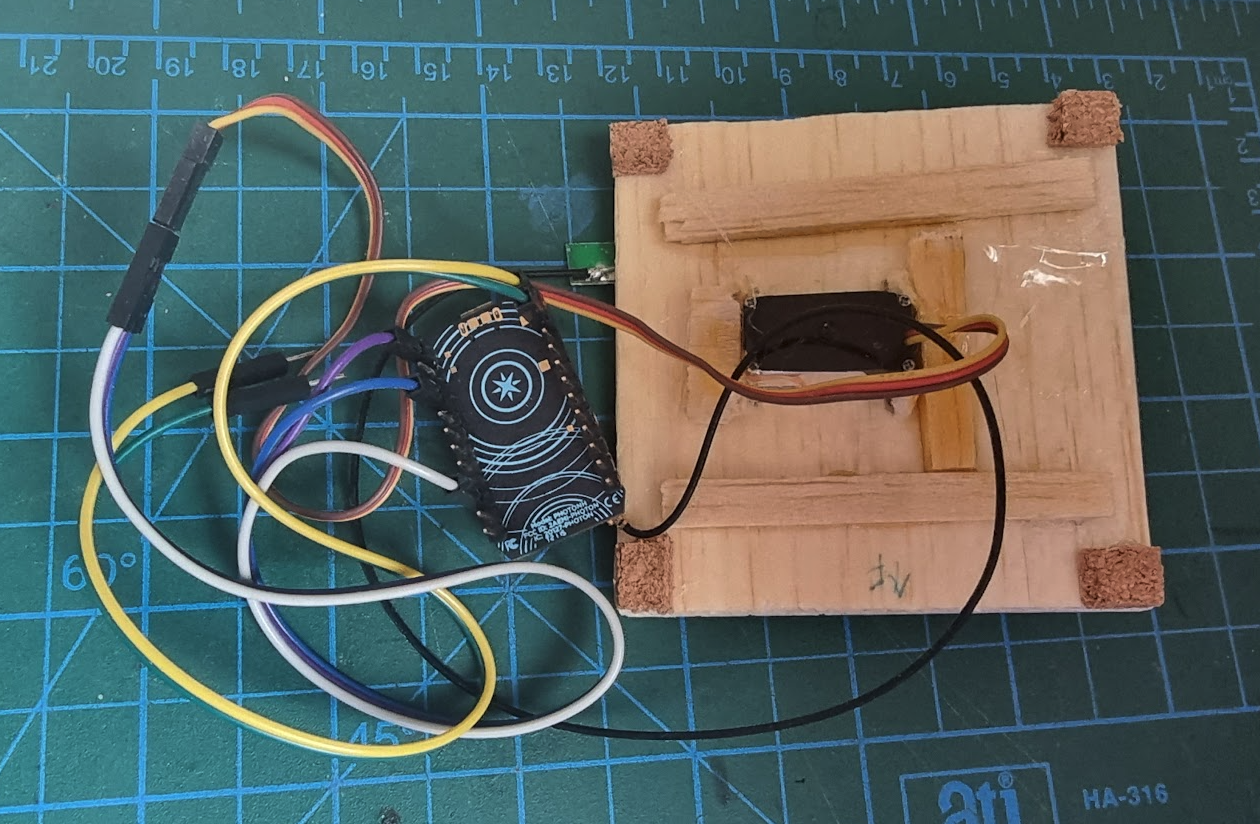
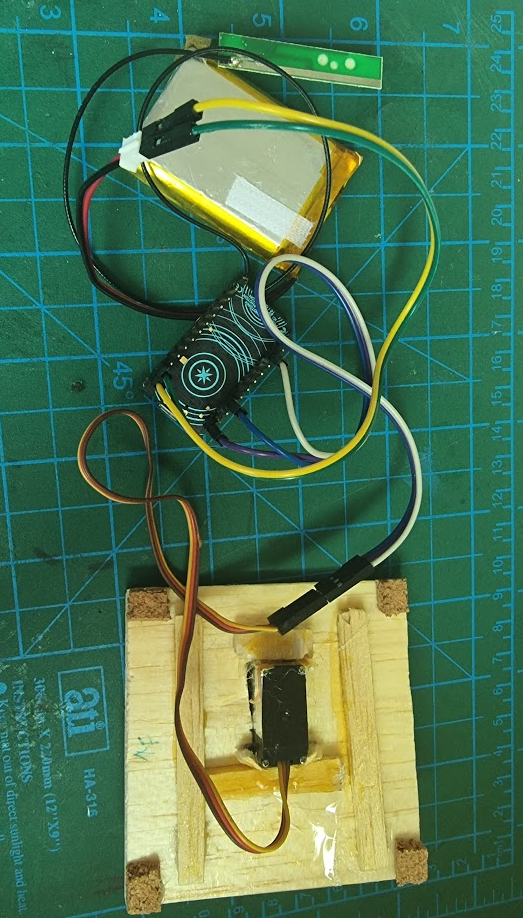
1Connect the wires as shown
Servo Control goes into D2
the rest is self explanatory (Power to power, GND to ground and so on )
![]()
![]()
-
2Load the code into the particle
copy the code and use particle IDE to load it into your chip, test using the particle IDE to make sure that the servo is rotating
-
3run the bash file on your mac
the bash script should run in the background checking the webcam status and invoking the particle service as needed
Cam Trooper "The Physical WebCam Indicator"
A physical webcam status "sith"-indicator, increasing the awareness of being watched. (a 3 hours project)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.