 Guillermo Perez Guillen
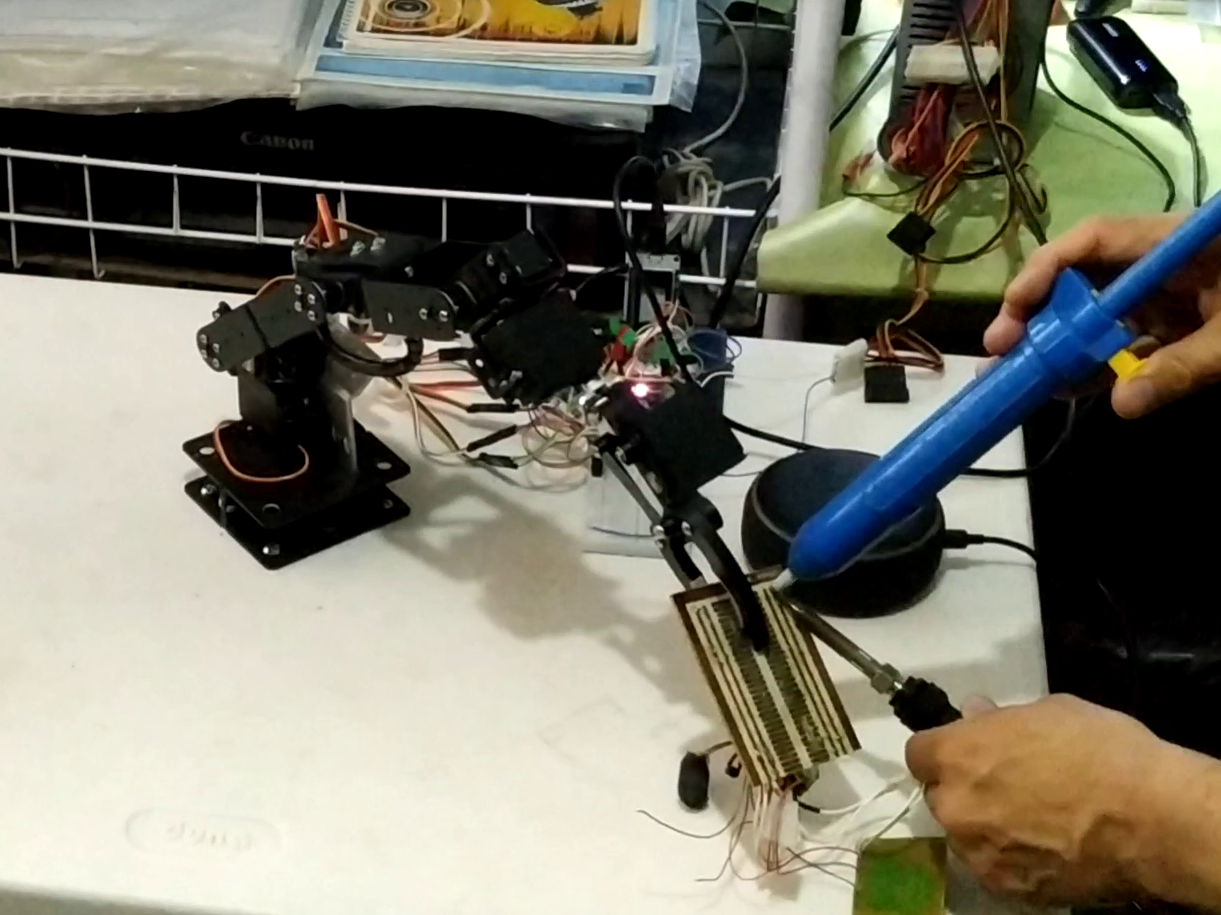
Guillermo Perez GuillenThis project was a good experience as I used a free tool to control my robot arm with the Alexa Echo Dot device. Also I can increase the voice commands as far as the memory capacity of the processor allows. As you can see, the clamp has large dimensions, so it can hold much larger objects, or even hold them in the right place so that we can work comfortably, the results were interesting and you can see them in the video below
0%
0%
Robotic Arm for Electronic Workshop
Collaborative Robotic Arm with Artificial Intelligence (AI), and Used as Assistant in an Electronic Workshop by Voice Commands
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
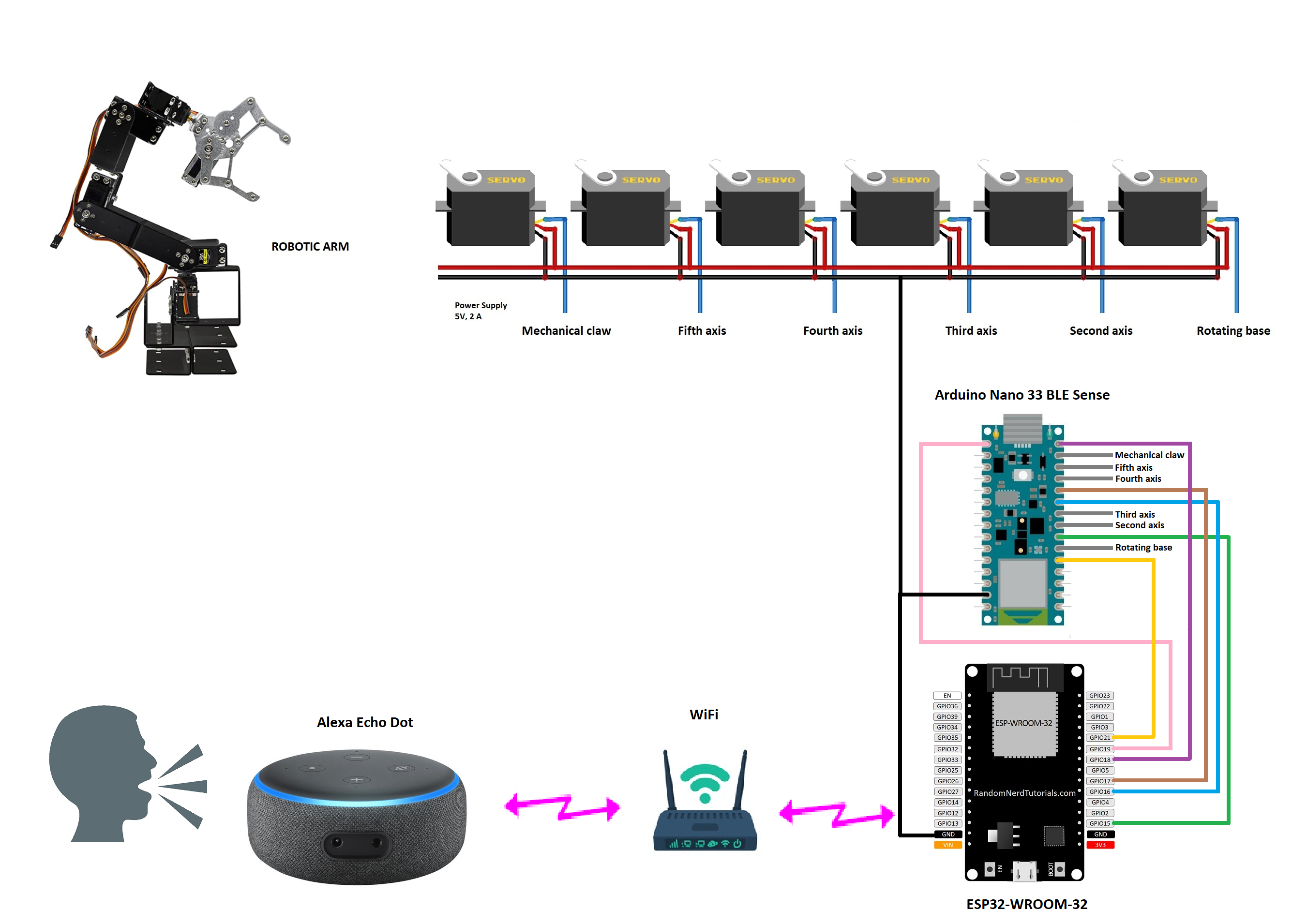




This project is innovative and revampes the electronic recycling market... even we can make adaptations to the gripper to collect different sizes of electronic devices, or mount support brackets to handle different types of PCB boards.