 Guillermo Perez Guillen
Guillermo Perez GuillenAs part of the hardware updates, I have re-designed my project and in the image below I show you the schematic diagram of the speed control.
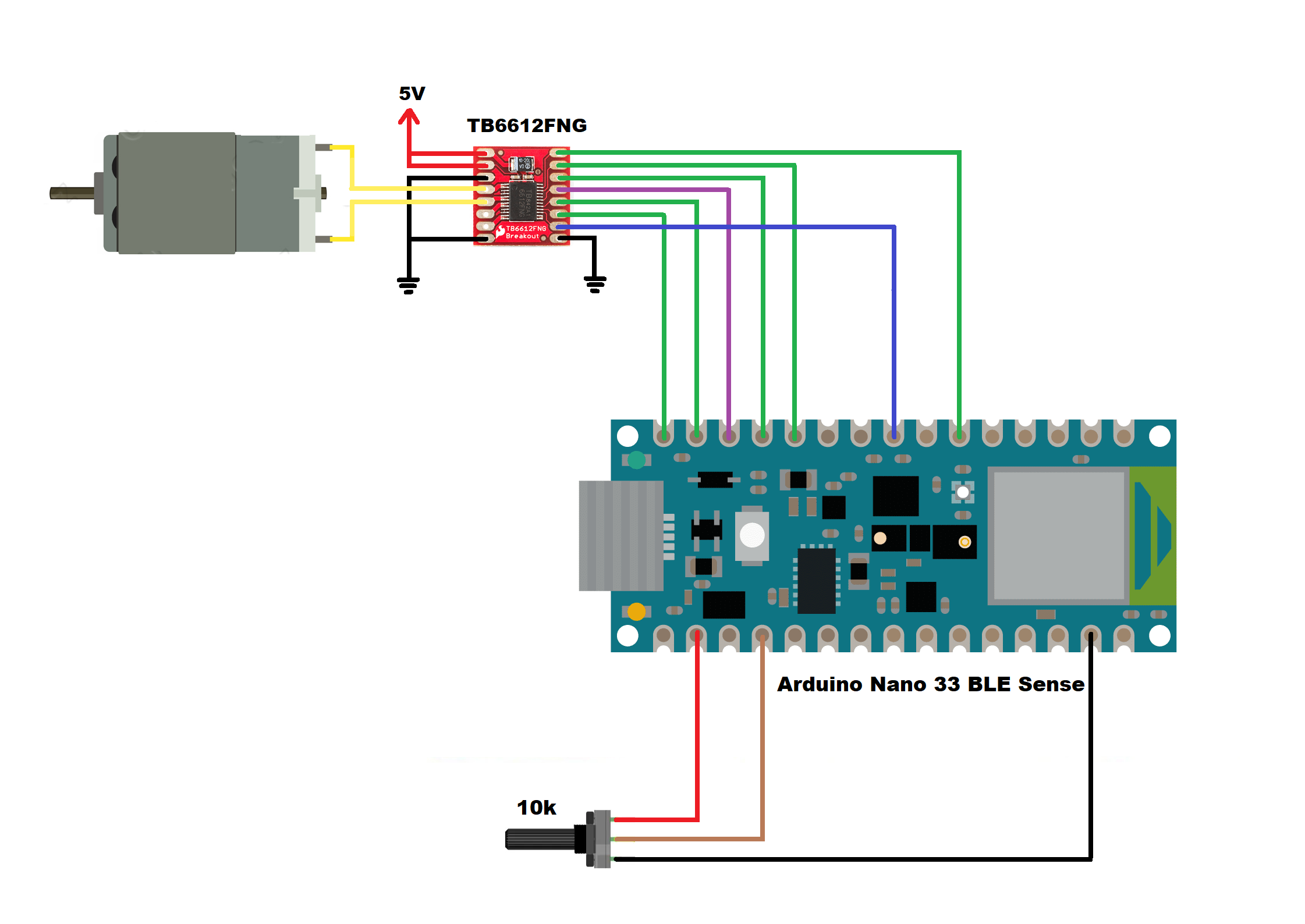
Below I show you an image of these devices.
In this way I optimized the spaces, and the energy consumption is lower with this Arduino Nano 33 BLE Sense board. Next I show you the code.
speed_control.ino
//AUTHOR: GUILLERMO PEREZ GUILLEN
#define POT A0 // Pot 10k
int raw_pot; // Store value of the pot
int duty; // duty cycle - PWM
int STBY = 10; // standby pin
// motor A
int PWMA = 3; // velocity
int ain1 = 9;
int ain2 = 8;
// motor B
int PWMB = 5; // velocity
int bin1 = 11;
int bin2 = 12;
void setup(){
pinMode(STBY, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(ain1, OUTPUT);
pinMode(ain2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(bin1, OUTPUT);
pinMode(bin2, OUTPUT);
}
void loop(){
raw_pot = analogRead(POT);
duty = map(raw_pot, 0, 1023, 0, 255); // range vaalue from 0-255
mover(1, duty, 1); // motor 1, velocity, forward
mover(2, duty, 1); // motor 2, velocity, forward
delay(50); // 50 ms
}
void mover(int motor, int velocidad, int direccion){ //Let's define the move function, a acciona un motor, fijar su velocidad y el sentido de giro. Definimos: //motor: llamaremos 1 al motor A, y 2 al motor B
//velocity: from 0 to 255
//direction: 0 for clockwise, 1 for counter-clock wise
digitalWrite(STBY, HIGH); //disable standby to move
boolean inPin1 = LOW; // we create the boolean variable (it can only be HIGH/LOW) inpin1
boolean inPin2 = HIGH; // and we assign the value LOW. To inPin2 we give the value HIGH
if(direccion == 1){
inPin1 = HIGH;
inPin2 = LOW;
}
if(motor == 1){
digitalWrite(ain1, inPin1);
digitalWrite(ain2, inPin2);
analogWrite(PWMA, velocidad);
}else{
digitalWrite(bin1, inPin1);
digitalWrite(bin2, inPin2);
analogWrite(PWMB, velocidad);
}
}
void stop(){ // standby action
digitalWrite(STBY, LOW);
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.