 Timo
TimoThis is the concept of the ROV
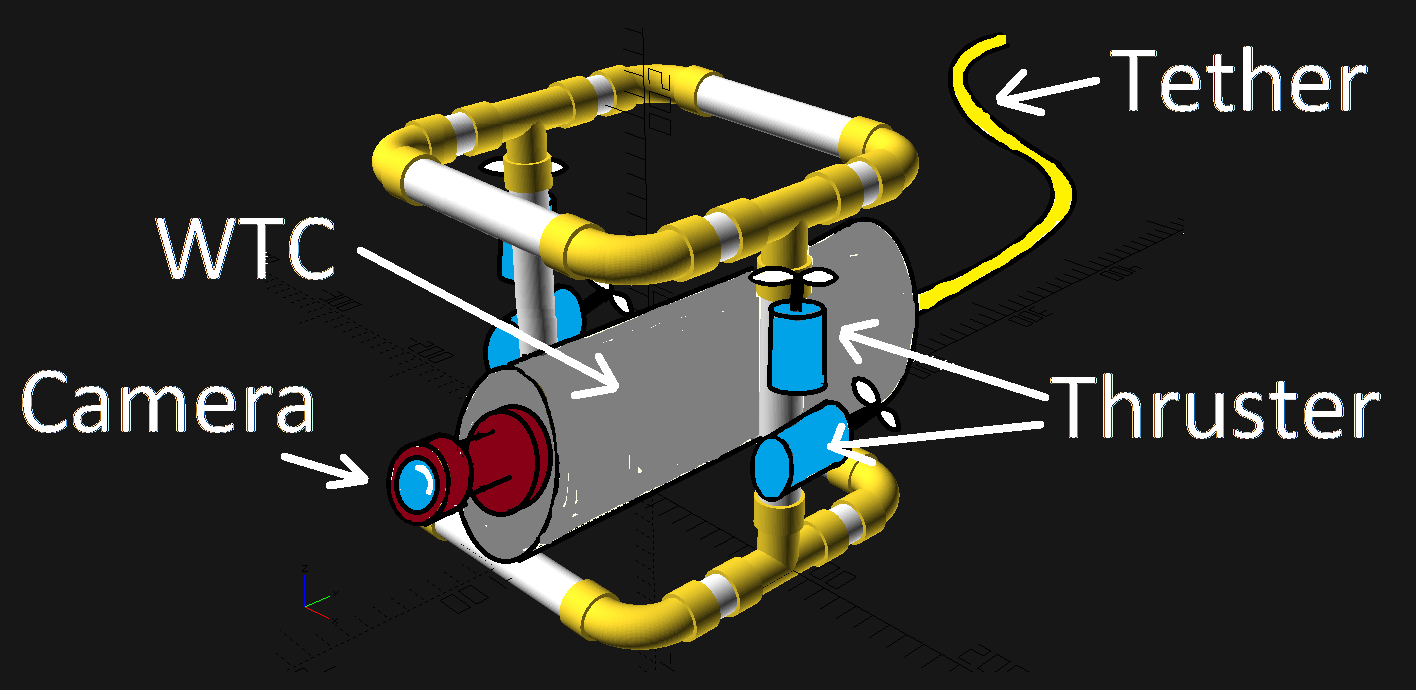
It will look like any other DIY ROV. The Water Tight Compartment is mounted on a frame which keeps everything together. Two thrusters push the ROV below water and control the depth. Two additonal thrusters provide forward and backward thrust as well as differential steering.
In the front of the ROV will be a camera. To provide a good view for the operator the camera will be mounted on a gimbal in a plexi dome.
The analog video signal will be linked to the water surface through the tether. Steering comands will be provided through the tether as well by means of RS232. Power will be provided by the on board battery to prevent large voltage drops across the tether. This will also keeps the tether from being thicker than my ... arm. What did you think?
The other end of the tether will get some love when i am done here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.