0%
0%
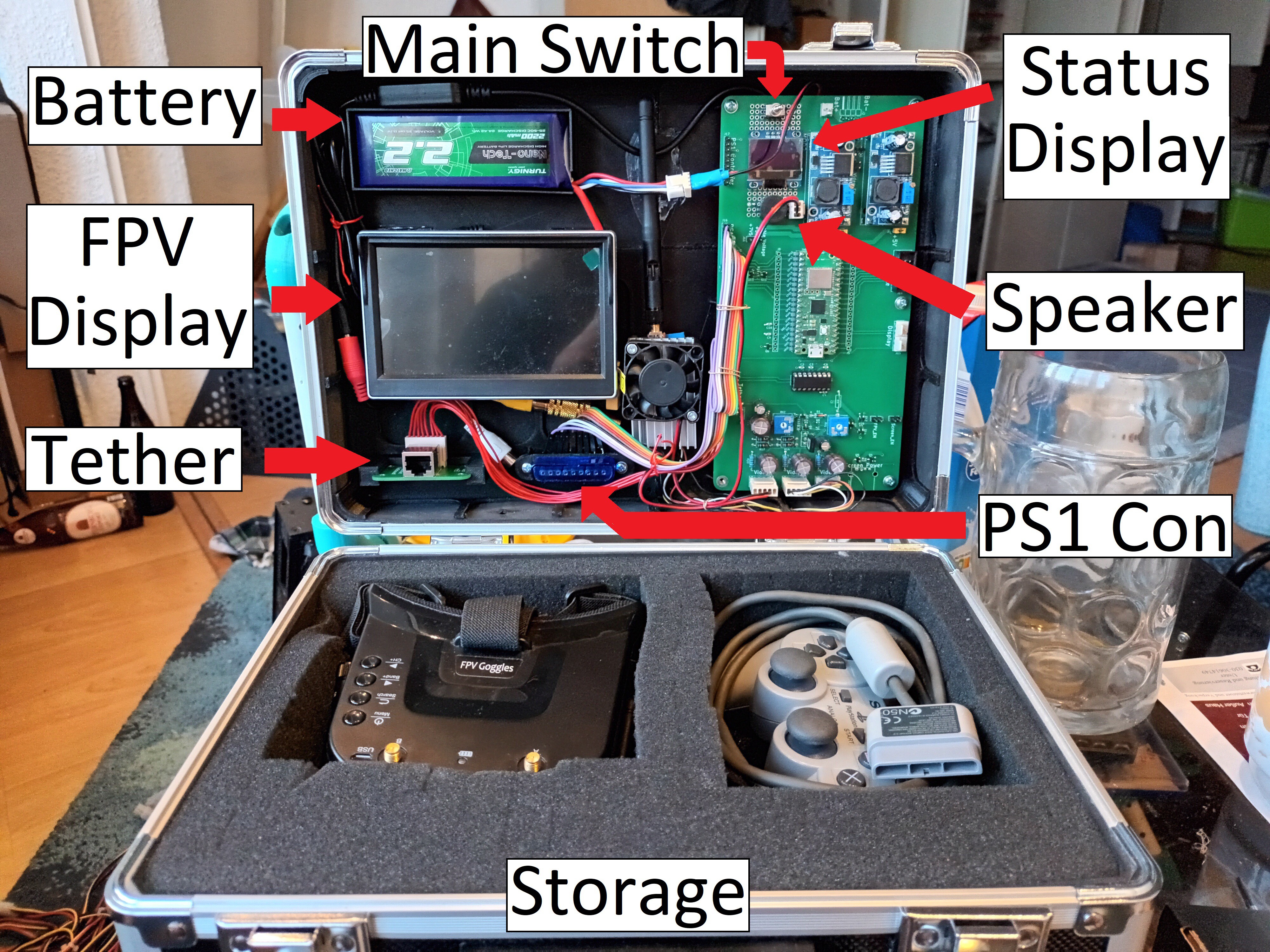
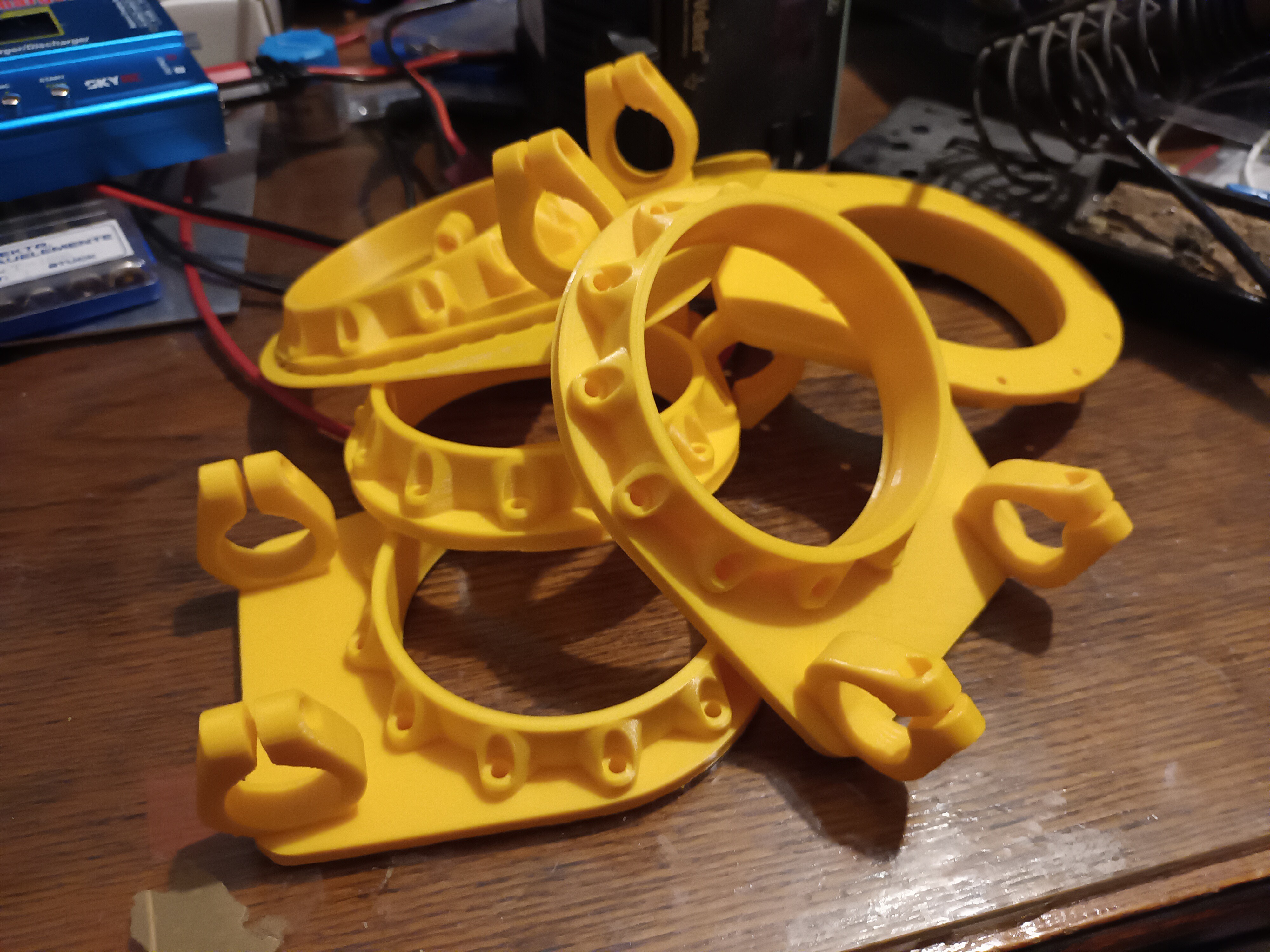
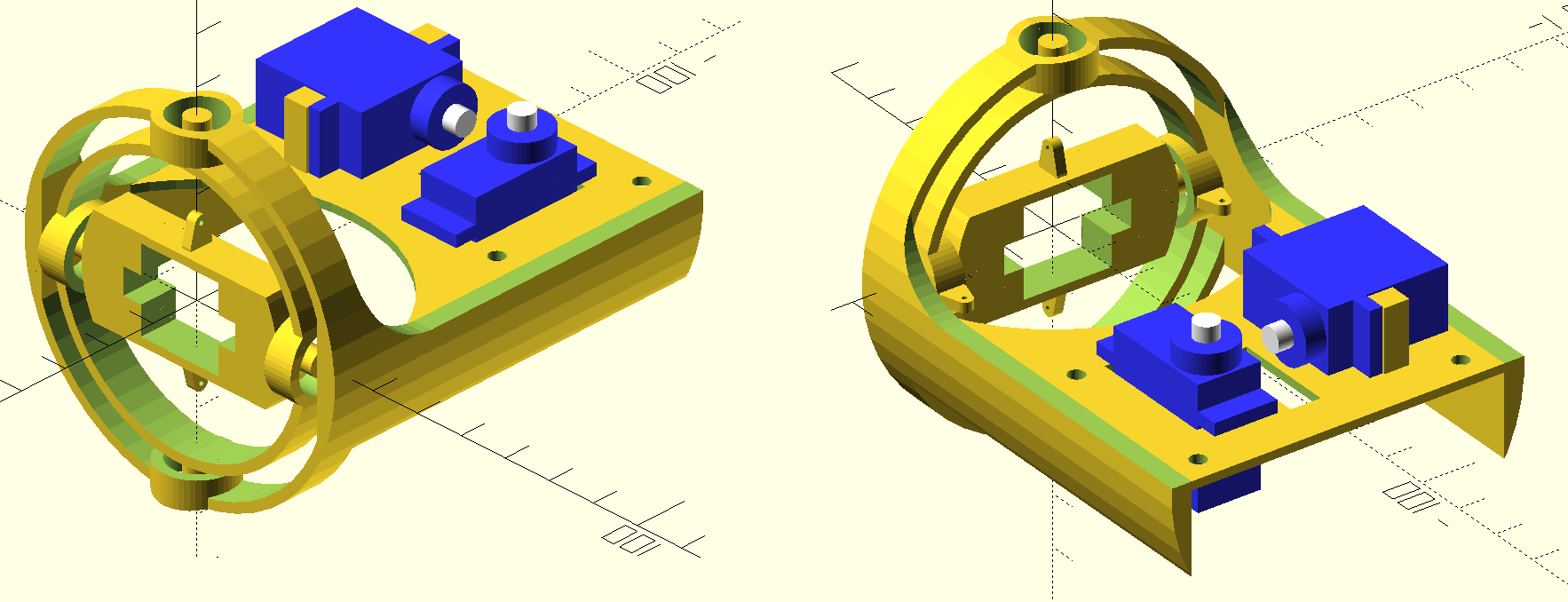
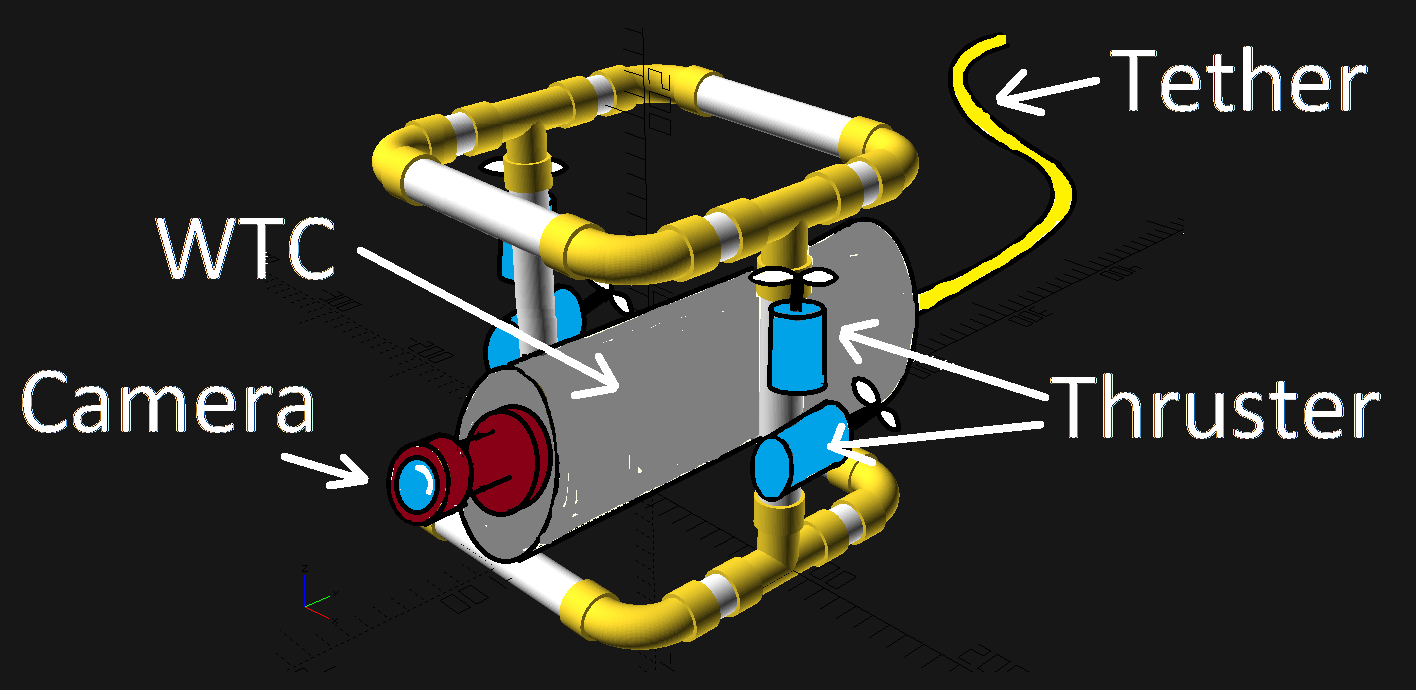
Turbo Super Submarine
A simple ROV i can use to dive to the deepest depths of my bathtub and my neighbor's swimming pool
 Timo
TimoBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests













 Nikola Secerovski
Nikola Secerovski
 Technics
Technics
 ivorivetta
ivorivetta
 Markus Loeffler
Markus Loeffler
Just saw this in the MagPi magazine (free as pdf) https://www.oceandiscoveryleague.org/low-cost-sensors-and-systems