Ultimate Robotics
Ultimate Robotics-
We’ll be on Maker Faire Kyiv this weekend!
02/29/2024 at 14:11 • 0 commentsQuite symbolically, this Saturday, on March 2, Kyiv will host the first Maker Faire Kyiv in a long time! The last one was in 2018.
Where, in addition to uECG and uMyo, we’ll present our first project in collaboration with TURFPTAx
The device working name is uLabel and it is an ML dataset collection tool for finger movements.
Makers from Kyiv (and anywhere else, if you’ll be visiting) - we will be glad to see you!
![]()
-
We’re taking a break until September 2024
02/29/2024 at 14:08 • 0 commentsAfter the events of last year (when our stores on Tindie and Etsy were blocked), we decided that this was a "sign" to stop a little and approach the future sales of our devices more reliably.
Selling products from Ukraine was a quest from the very beginning, we spent almost a year to launch sales on Tindie in 2020, and a week after appearing on Etsy, we were blocked without specifying the exact reason (there was only a general list of policy categories).
In any case, we’re grateful to Tindie for allowing us to sell our devices at all.
And most importantly, we thank you all for supporting us and using uECG and uMyo! 💖🤗
But financial instruments in Ukraine do not allow us to fully use the existing platforms (we don’t have PayPal or Stripe) and we are very tired. We decided to take some time off to find alternative sales methods and platforms.
So until September 2024, we will suspend sales of uECG and uMyo and concentrate on our other work, of which there is a lot. We would be happy if you continue to work on your projects and develop using our devices until we are back. We will provide support as before, but we will not be able to sell the devices.
Good luck with your projects – and we’ll be in touch!
-
Mouse emulation with muscle commands
05/30/2023 at 18:16 • 0 commentsMaking a convenient - or at least usable - input device proven to be much more difficult than it seems. PC interface is seriously optimized for mouse properties, assuming that a mouse can be moved easily over a few pixels. When a gyroscope is used to track uMyo orientation, translating its data alone into cursor placement is not convenient - with such approach you must keep your hand in the same orientation with high precision and try to click with muscle effort without moving a hand even a tiny bit.
We approached this problem by using 2 uMyo sensors: while one muscle is active, mouse cursor follows hand motion (and scroll is produced when arm rotates). When another becomes active, mouse click is generated. With this approach, mouse can be controlled from much more relaxed hand position and precise clicks become much simpler/
-
Another step towards our goal: prosthetic arm control demo
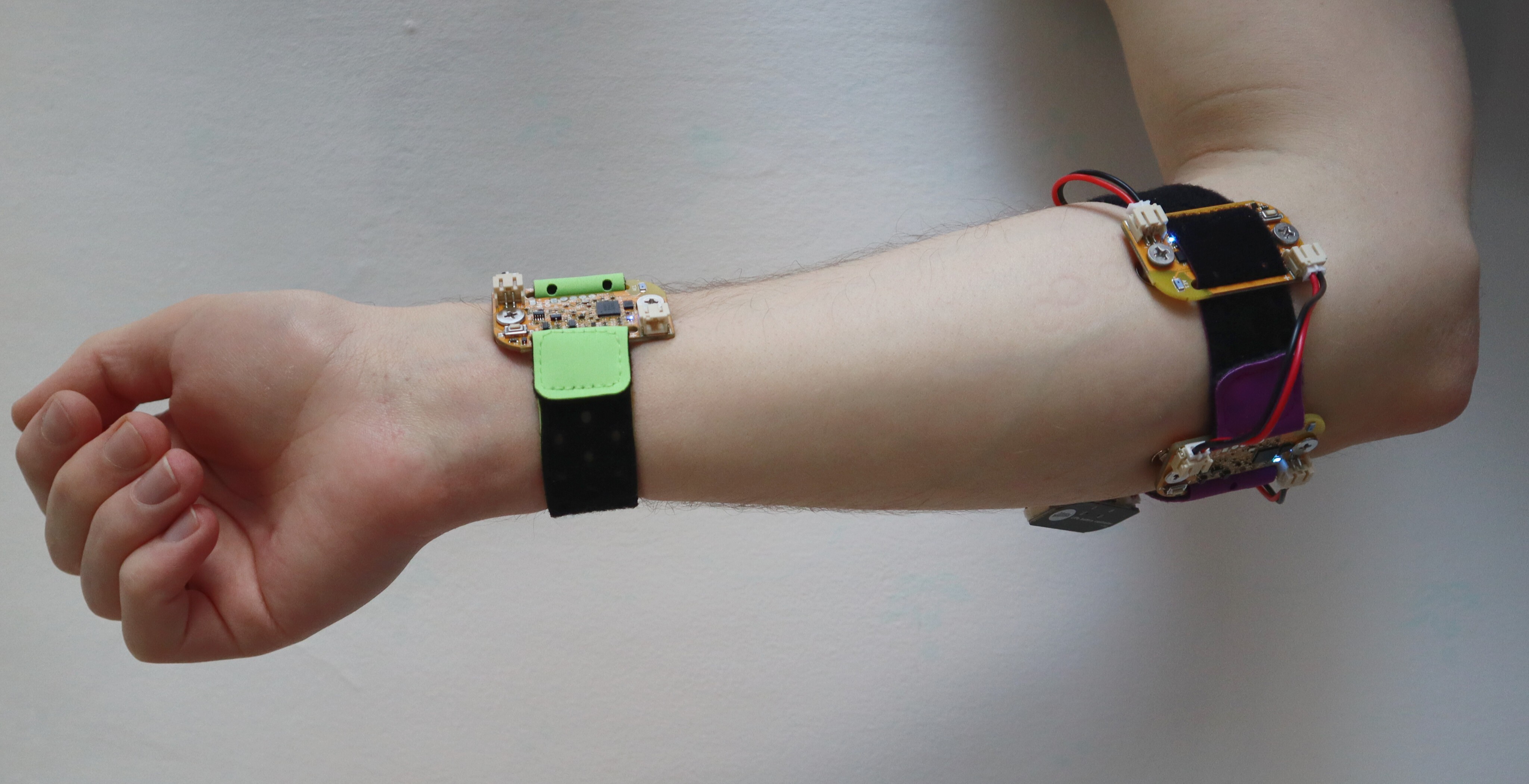
05/14/2023 at 15:00 • 0 commentsThe next step in uMyo development is combining data from multiple sensors. And since a significant part of our goal is using uMyo in prosthetics control - this demo shows how it can work.
In a sense it's a remake of our effort from 2019 based on uECG sensors in EMG role, but seriously upgraded - both in reliability and in simplicity of replication. Now it works basically out of the box - only thresholds need adjustment for a particular person. This particular demo took about 8 hours in total - that includes coding, adjusting and making the video (we used the same robotic arm as in 2019 - making one from scratch of course would take much longer).
![]()
Three uMyo units are used here: two next to the elbow, placed over muscles controlling 3rd, 4th and 5th fingers (one unit is monitoring 3rd finger, another monitoring 4th and 5th without differentiating between the two). The third uMyo is placed on a wrist to pick up thumb motion. That part is good for demo only - in case of amputation, prosthetic's thumb must be controlled with some other muscle. We tested several variants on the arm - even attached thumb control to a triceps - but none are both reliable and illustrative at the same time, so we stuck with the wrist placement for a demo.
Signal processing is intentionally very simple - only thresholding, scaling and averaging - with the goal to make it easy to understand and adjust. For practical applications much better results can be obtained with machine learning - which we'll show in further work.
Control quality is quite good - the only noticeable problem here is cross-sensitivity between 3rd and 4th fingers, not huge but it takes some effort to apply just enough force to trigger one finger motion without triggering another. Response time is very good - basically limited only with servo speed, servo motion starts immediately when the effort is applied.
We believe with some ML and possibly more sensors involved, this can be applied in practice without significant additional work on the hardware.
-
uMyo is back in stock! + new PCB update
04/10/2023 at 16:29 • 0 commentsHello everyone! Last week, we reopened uMyo sales - it's back in stock with a new version, v3!
It's actually been available since April 5, but we were so busy with our workload we kept postponing to write the posts. So, a week later, here it is at our Tindie store - run, do not walk, and get your uMyo today!
Just joking - but definitely do go check it out :)
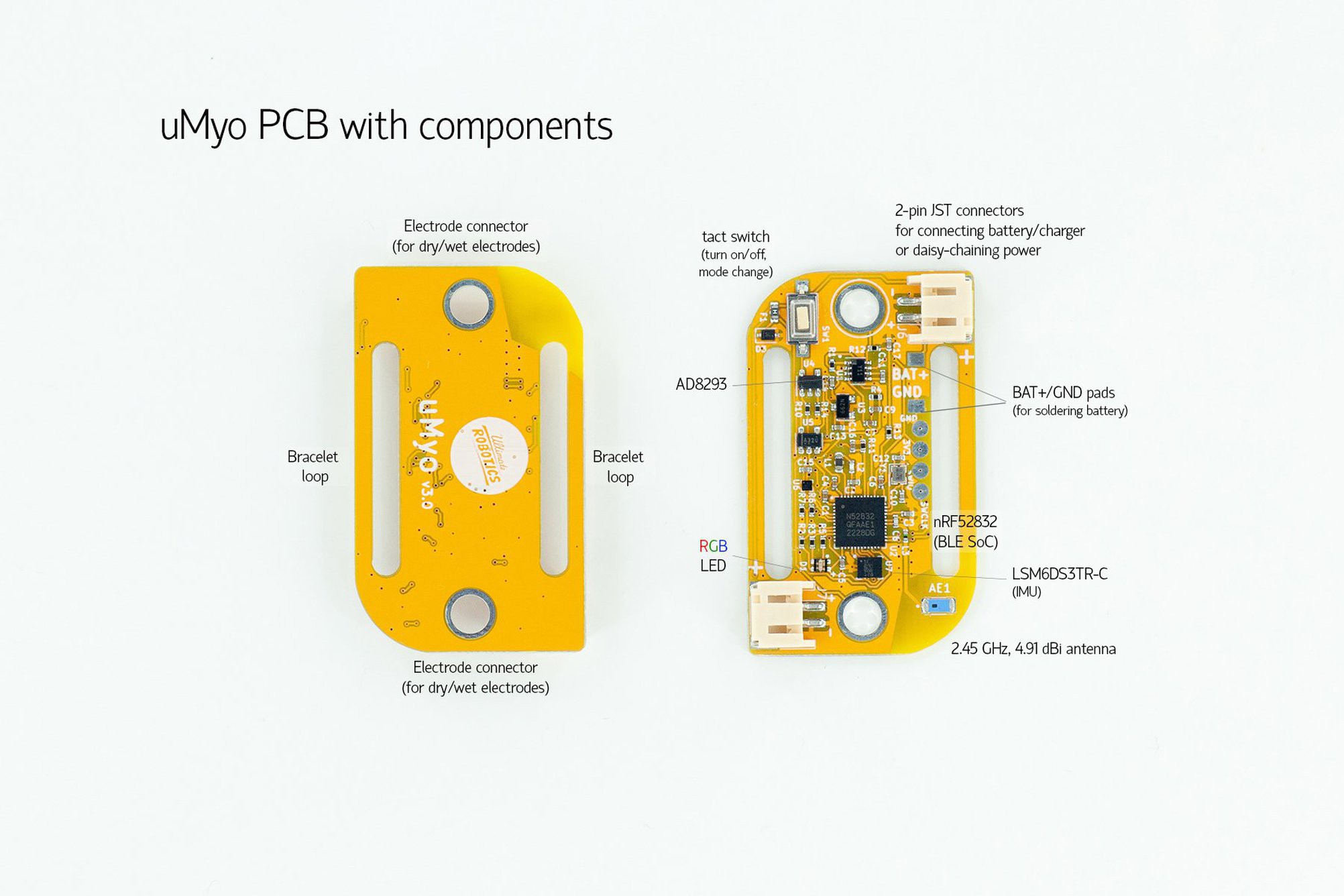
We made some changes in the new version, including a new board shape, a separate charger board and a CR2032 battery holder so you can start working with uMyo even if you don't have a lipo battery. There are also hardware changes with the components, some new firmware functions, and general improvements.
![]()
Changelog for v3:
- changed board design for more dense placement and easier connection of multiple units, it's now smaller - 28*47*7 mm vs 32*49*7 mm for previous version (2.1)
- added on-board compass in addition to IMU in v2.1. Orientation tracking now has no drift!
- moved on-board charger to a separate charging board (included in kits), reducing uMyo size and weight
- changed chip to nRF52832 instead of nRF52810 (due to chips availability)
- added CR2032 operation mode with LED turned off to minimize power consumption, single battery can provide ~3 hours of operation for one uMyo
Our team will have some more updates for you in the coming months, so keep an eye out and stay safe, everyone!
-
Tetris on a LED board - controlled with uMyo
03/19/2023 at 21:47 • 0 commentsOur new demo project using one uMyo, this time it's Tetris!
We used LEDs from a previous LED clothing project and made a square. First, we implemented the game itself, and then added control using an EMG signal from the muscles of the arm and its position in space.
That's what came out of it:
Project details and files can be found here! -
New light patterns for LED clothes
12/16/2022 at 15:50 • 0 commentsWe decided all the same to use more muscle control capabilities with the help of uMyo.
The code and control details can be found here: https://www.hackster.io/frogolina/led-clothes-controlled-by-emg-d487da
And here is the result:
-
LED clothes controlled by uMyo
11/30/2022 at 13:31 • 1 commentWhen we started making uMyo, one of the concepts was relative ease of use, for a wider range of possibilities. Because EMG is often perceived as something medical, prostheses, rehabilitation. We wanted to add more variety and application possibilities for our future devices.
Toward the end of development, we began to try to create small projects to demonstrate the possibilities of muscle control. One of the unexpected directions was this project - smart clothes. The idea of the project is to change the LED patterns that are right on your clothes with the help of hand movements!
The implementation is very simple, it is described in more detail here
And here is the result:
In the future, I want to expand the functionality of movements and use triangles. So stay tuned for updates!
-
uMyo is officially on sale
11/26/2022 at 08:13 • 0 commentsWe have launched uMyo sales!
It actually happened a few days ago - we submitted the product on Tindie, it got approved, we started writing posts about sales launch, first orders started coming in... and then we got hit with massive air strikes targeting infrastructure, which caused country-wide blackouts. You probably already read about that in the news.
Because of that, we didn't have internet (or stuff like running water for some time, although it came back after a day or so). But electricity was harder to restore, mostly because this time nuclear plants turned off and needed some effort to bring them back on. They produce a lot of energy, a major chunk of the total power supply in Ukraine. It also didn't help that russians stole all solar panels and equipment from our Tokmak solar power plant in the south... Why can't they ever buy their own stuff? Eventually power came back for a few hours a day for some of the city areas, but a part of our team didn't have electricity for exactly 61 hours and 16 minutes... During this time, they were mostly only able to charge devices in the city and check the restoration effort updates when the mobile networks were not overloaded.
![]()
Blackout looks like this. This is taken at rush hour at a busy intersection near several large shopping malls.
Anyway, the light came back a few hours ago, so we're writing this project log.
We're very happy to finally launch uMyo. It's the first batch, and there will be more versions and updates in the future, but it's finally tangible and available for everybody to use in their EMG projects.
You can check it out and buy here in our Tindie shop.
![]()
We'll be shipping the first orders soon - most probably by Monday. We'll also update the instructions so you can have more details about uMyo and how to use it. The power will probably come on and off, so we'll be working around that.
Most of all, we're very excited to get the first uMyos to our buyers, get feedback - and start working on new features and updates! (and, of course, bugfixes :)
-
The fifth challenge is disposable electrodes
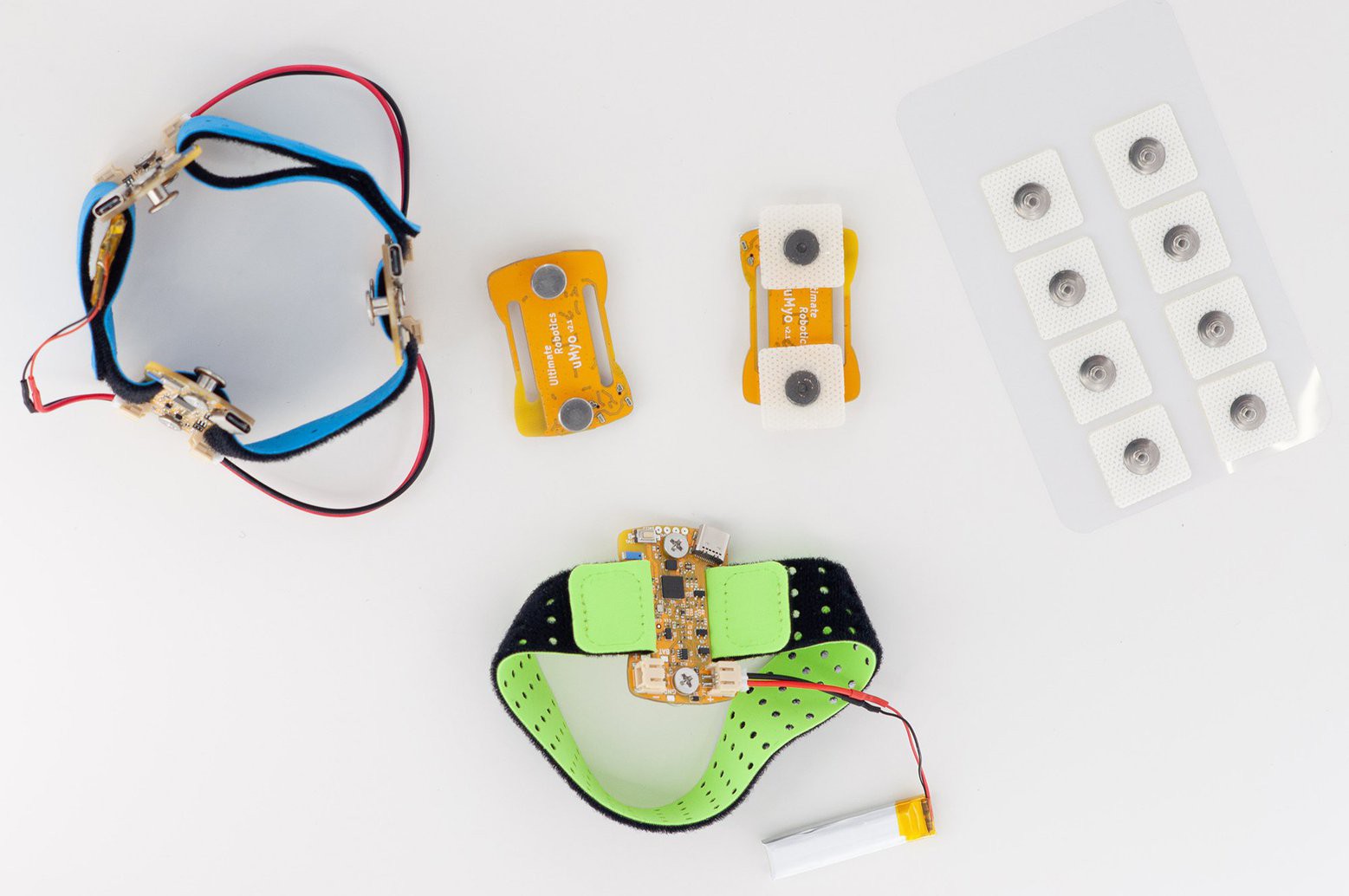
11/10/2022 at 20:31 • 0 commentsAccording to our observations, existing EMG sensors often use disposable electrodes to receive a signal. We initially began to look for an alternative to them, and as you can see from past logs, we found it.
But when we already debugged uMyo using dry connectors, it became interesting what kind of signal quality a gel electrode would give for comparison. And while we were looking for a way to check this, the idea came to make the possibility of a combined use, a kind of device with a hybrid attachment method. Because gel electrodes are still the classic way to receive a signal and perhaps some people will want to use it, and not the dry ones.
To begin with, we had a hard time finding metal buttons of the right diameter for the 3.9 mm connector of standard medical electrodes. After, we tried to solder them to uMyo. It turned out to be easier than soldering the connectors to the uECG...
![]()
![]()
Also, the distance between the connectors on the board is about 34 mm, so the diameter of the electrodes should be no more than 30 mm. It wasn't easy, but we found 20x20mm square baby electrodes and used them for testing.
![]()
Then we tested them - basically just attaching it to a hand over a particular muscle. Results turned out to be great - it was practically immune to noise and able to pick signal from a muscle that controls particular finger, while other fingers movement produced barely visible response.
![]()
Let's summarize - uMyo can now be used in two ways, depending on the required signal quality. Dry electrodes are quite suitable for all purposes - yet when high precision is necessary gel electrodes outperforms them, to the point that they can be used on muscles not functioning properly like in rehabilitation.
uMyo - wearable EMG sensor with wet/dry electrodes
EMG sensors for controlling devices and PC with muscle commands