Andrew Benson
Andrew BensonRobots fighting fires
modular and scalable
spider says bleep bloop
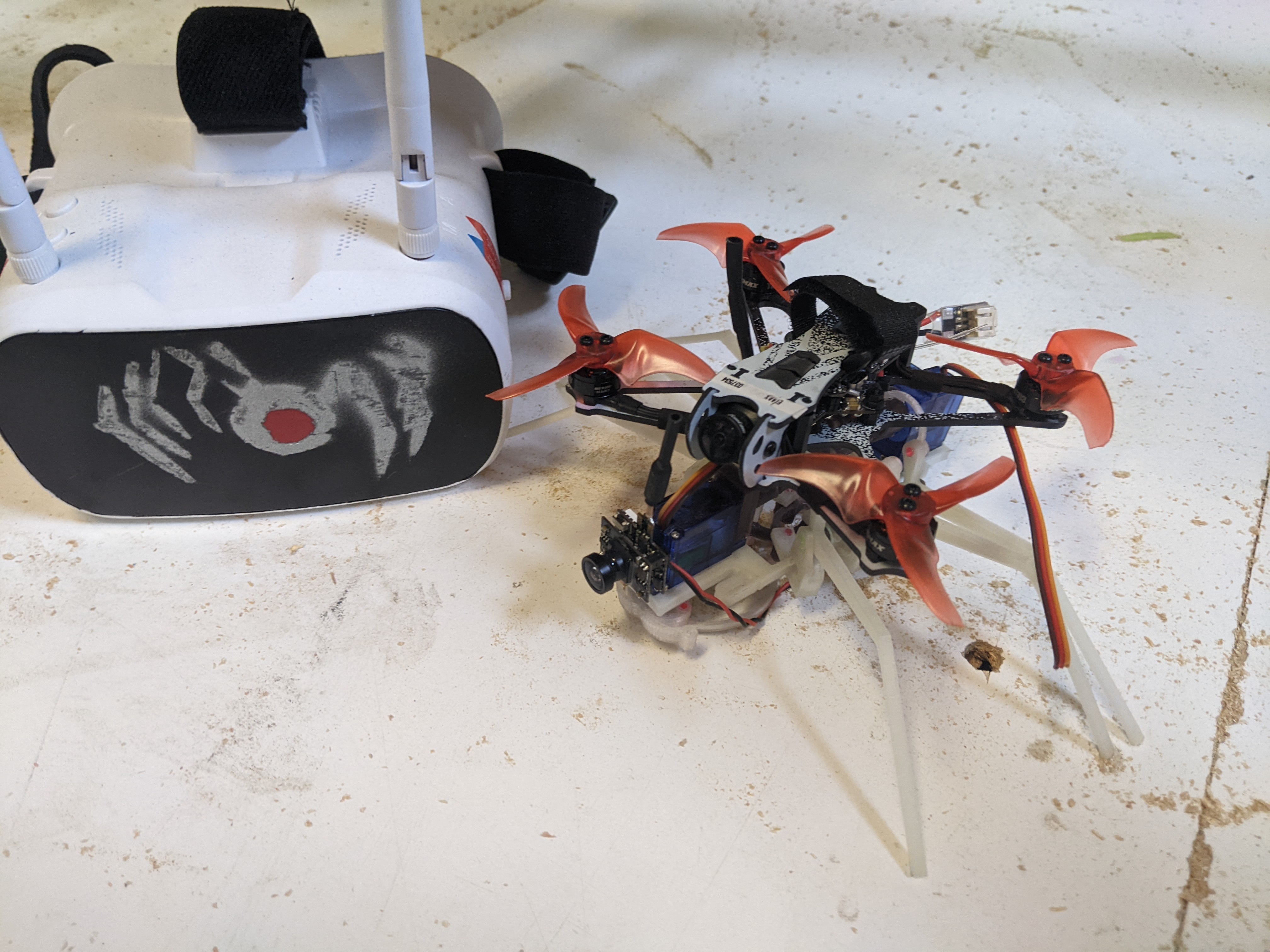
provide basic walking functionality with as few motors as possible
minimal electronics requiored for control and functionality
allow for autonomous function and remote control
modular attachment points for various tasks
buildable from wood, plastic, and metal
can carry significant payload
scalable architecture
open source