 Andrew Benson
Andrew Benson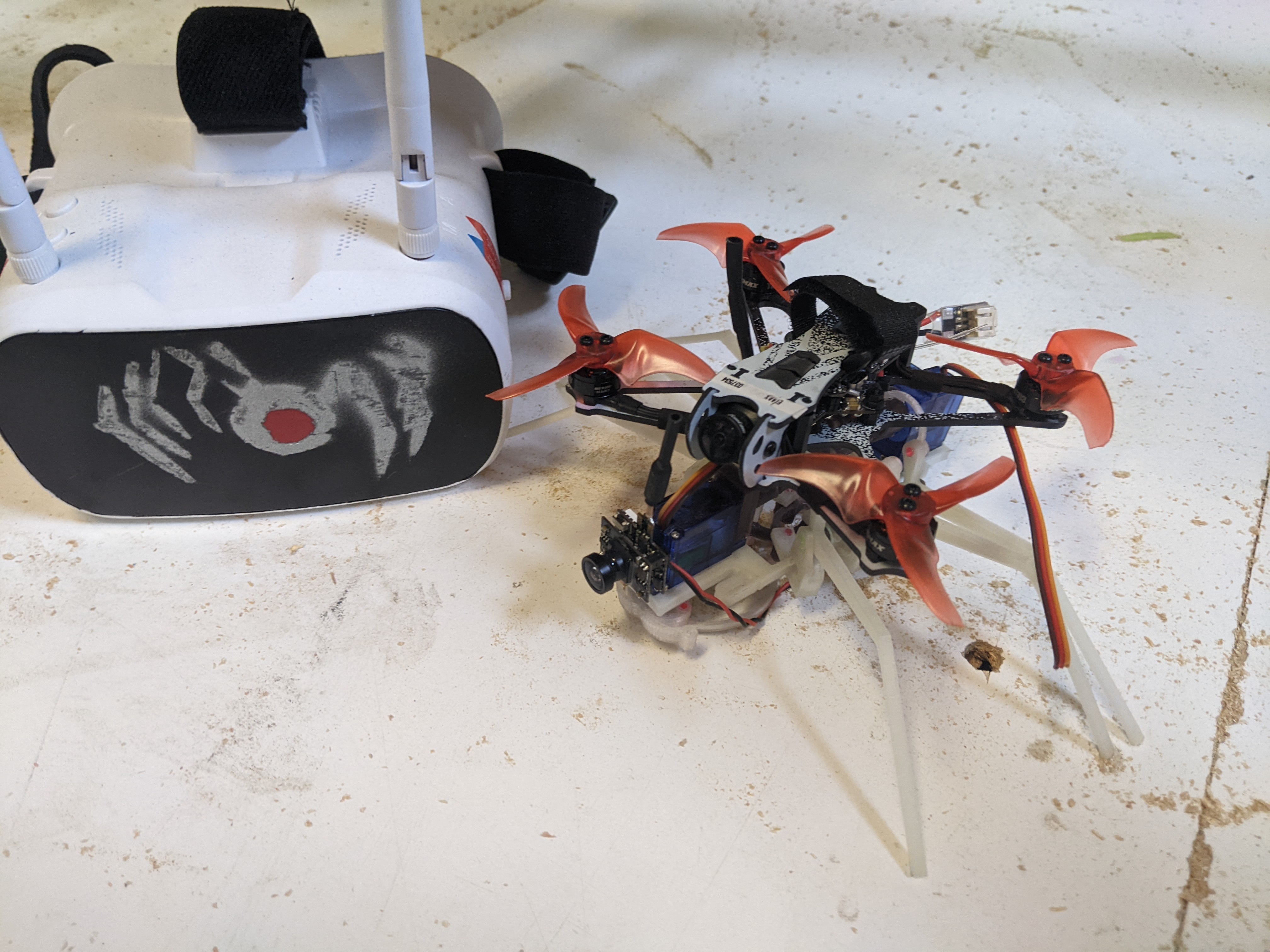
One of the features of the current iteration of XANDR is a quadcopter that can take off from the back of the spider and carry a hook into a tree. A small magnet allows the quadcopter to detach from the hook, and the larger spider can winch itself up the tree for branch trimming. During the first test of the system the quadcopter lost control, and took a hard dive into some nearby cement. It seems like the FPV camera was broken in the fall - hopefully the quad can be repaired without too many new parts, and the next test will be done on a tree with softer surroundings (this tree was chosen due to proximity to the shop, and thus ladders.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.