Steve Hernandez
Steve Hernandez
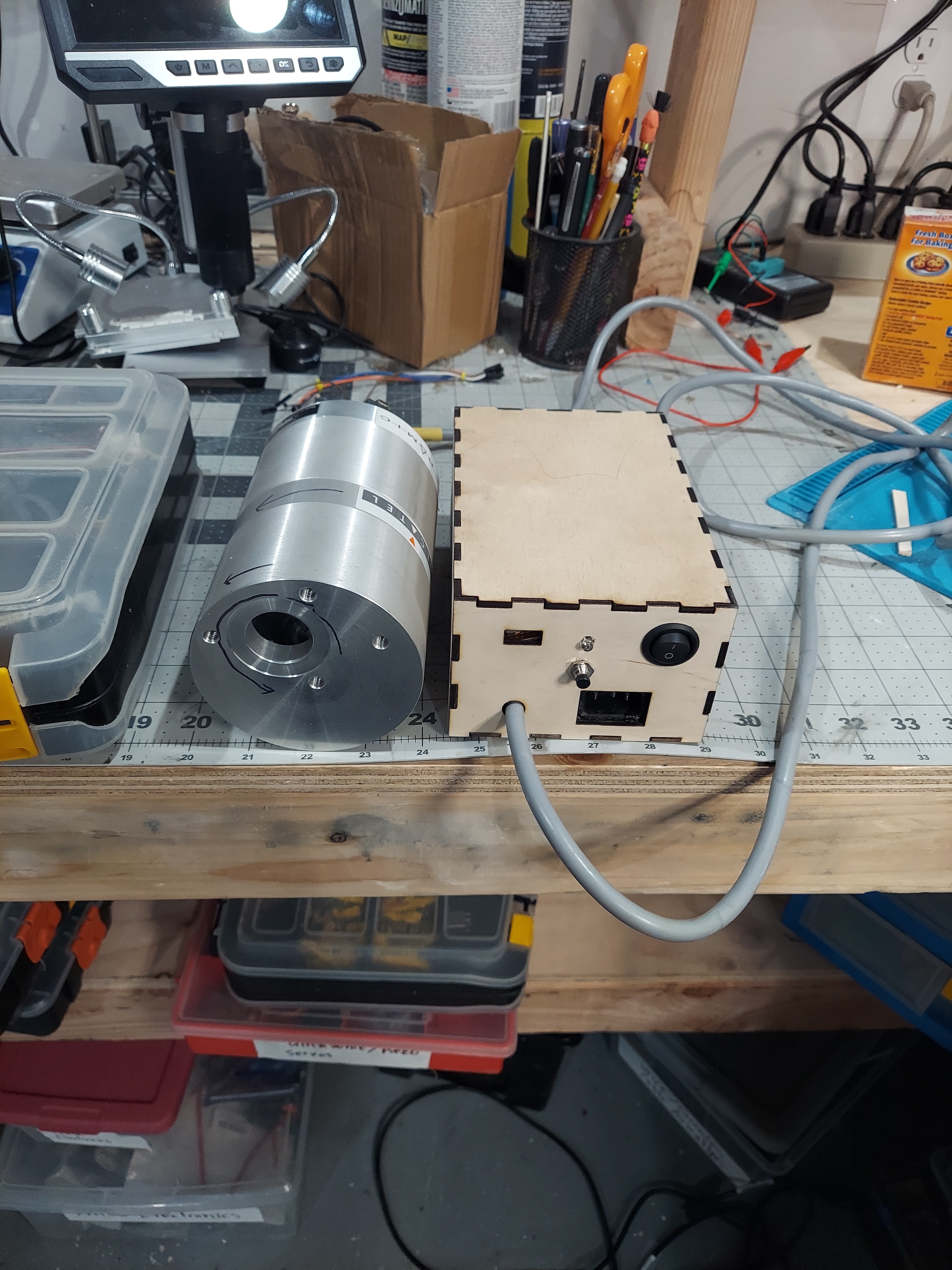
At first I was really Unsure how I would even get the motor spinning in the right direction. After tapping the motor coil to a 12-volt source of several times I was able to get it's just been fairly reliably in either direction.
I connected the hall effect sensor to my oscilloscope and I manually tapped the coils to see the difference in phase between coil activation and when the hall effect sensor trips.
I wrote a firmware for the Arduino Nano that allowed me to change the phase activation angle as well as the duty cycle of the pulse I was sending. The firmware can also light up an LED in three colors to indicate the current state that the motor is in. I have a single push button that I use for starting and stopping. I also implemented some control over the serial port so I would be able to control it automatically from another computer in the future. After reading through some documentation for some similar devices, I was able to determine that the max speed of this device is around 27,000 RPM
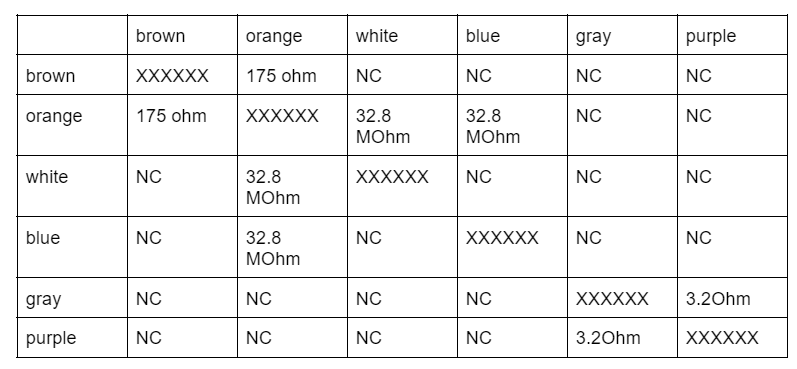
Shown below is a simple diagram of the color coding and the basically out of the back of the device. I made this when I was determining a continuity chart between all the wires.