 Bryant
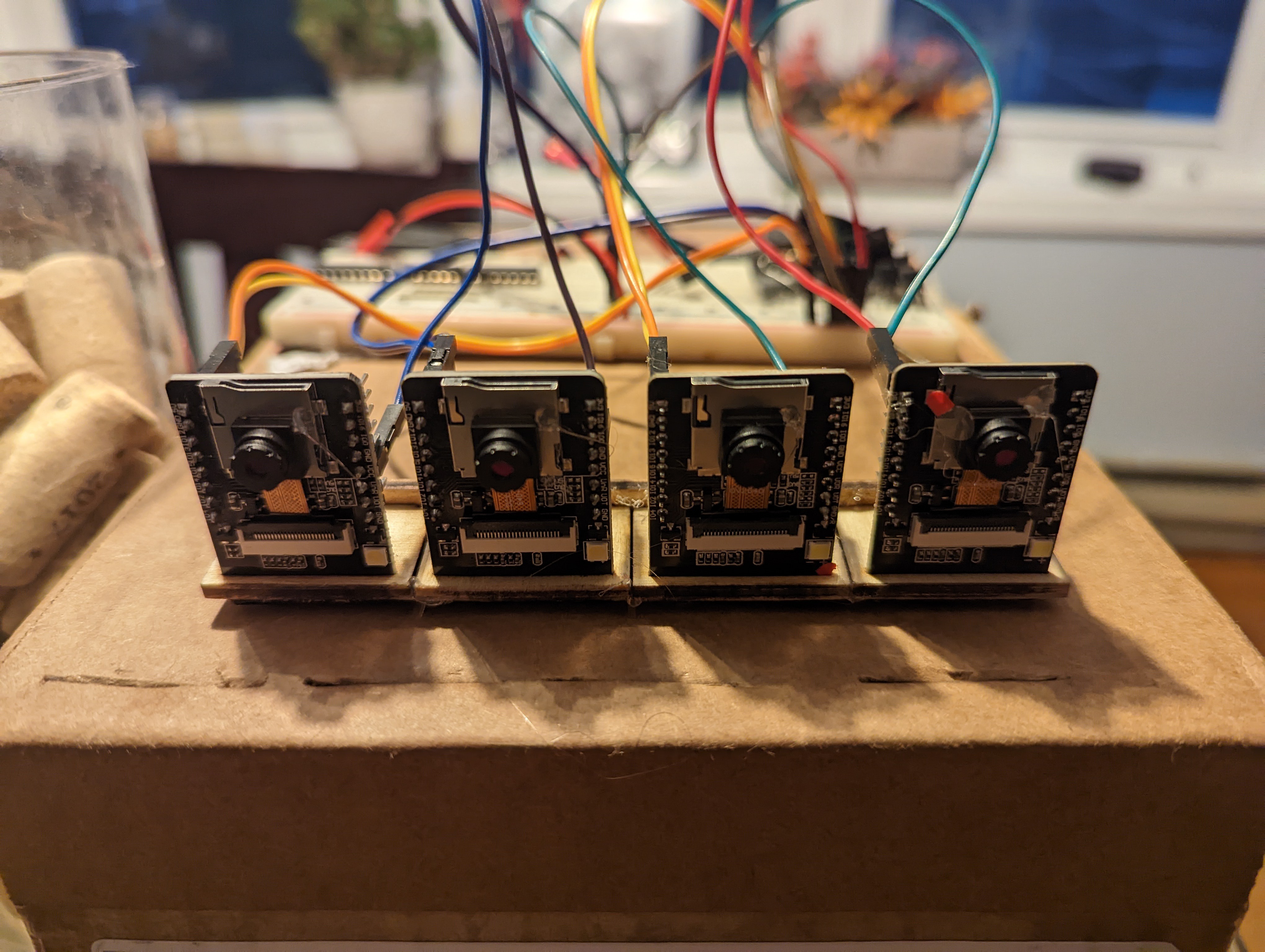
BryantI was inspired by wigglegrams a while ago and decided to start taking these photos as well. Initially I was going to build a lens much like the source of inspiration. One day I was looking in my hardware box and realized I could emulate the lens technique with the handful of esp32-cam modules I had laying around.
0%
0%
Wigglegram esp32-cam
Making wigglegrams using some esp32-cam boards
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 jimmy.c.alzen
jimmy.c.alzen
 allexoK
allexoK
 Pure Engineering
Pure Engineering
 Ryan Bailey
Ryan Bailey