 deʃhipu
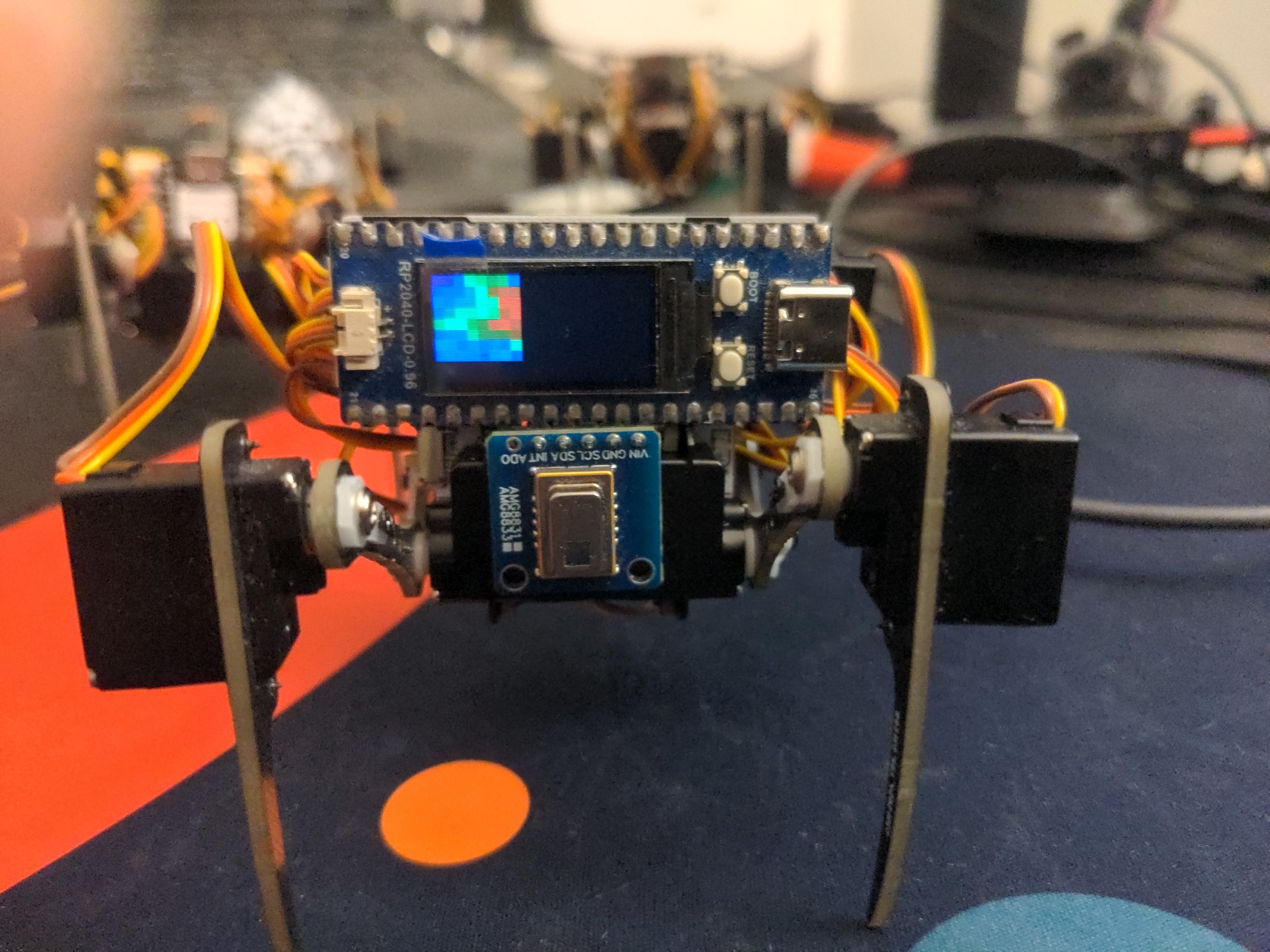
deʃhipuThere is a header with the 3.3V power, I2C and INT pins broken out just above the servos on the Wee Bug (and other of my robots as well), because I was planning on plugging a time-of-flight distance sensor module in there. Turns out that a lot of different sensor modules are compatible with pretty much the same pinout, so you can use them in that place. So far I tried a gesture sensor and a TV remote IR sensor (that one is not a module, just a part plugged directly into the power and INT holes). But I noticed that the AMG888 thermal camera module also has the same pinout.
So when I assembled a new #Moo Bug using a pi pico clone board with a built-in display, I decided to give it a try:
Turns out that there is already a driver library for that sensor in CircuitPython, so my code was very simple:
import time
import busio
import board
import adafruit_amg88xx
import displayio
import rainbowio
i2c = busio.I2C(board.GP5, board.GP4)
amg = adafruit_amg88xx.AMG88XX(i2c)
bitmap = displayio.Bitmap(8, 8, 256)
palette = displayio.Palette(256)
sprite = displayio.TileGrid(bitmap, pixel_shader=palette)
board.DISPLAY.root_group = displayio.Group(scale=8)
board.DISPLAY.root_group.append(sprite)
board.DISPLAY.brightness = 0.01
for i in range(256):
palette[i] = rainbowio.colorwheel(255 - i)
while True:
for y, row in enumerate(amg.pixels):
for x, temp in enumerate(row):
c = min(255, max(0, int((temp - 20) * 30)))
bitmap[x,y] = c
time.sleep(0.1)
Now I'm thinking about what kind of behavior I could code using that camera. And no, no heat-seeking missiles.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.