 AVR
AVRFeatures:
- Uses the Bowler Communication system (
http://neuronrobotics.github.io/Protocol )
- Connection over USB 2.0 with either of the two available ports
- Bowler Expansion Port for accessories ( 5v Logic )
- Programmable with the Neuron Robotics SDK ( https://github.com/NeuronRobotics )
- Bare metal C/C++ support (possibly mBed support too but not yet decided)
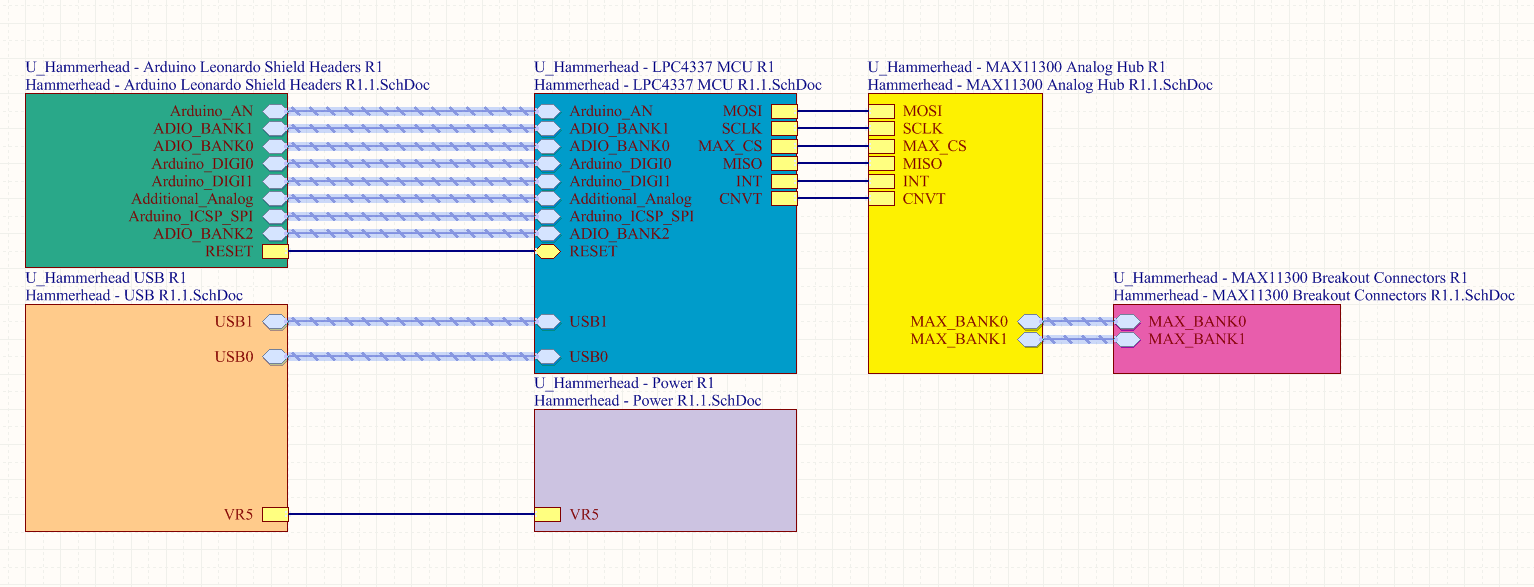
- NXP LPC4337JBD144 ARM Cortex M4F/M0 asymmetrical dual core digital signal controller, both cores clocked at 204MHZ
- 20 Analog Channels that support analog input and output at 12 Bits and GPIO via the MAX11300, these channels are 5v compliant.
- Arduino Leonardo Headers double width for more IO breakout, these ports are 3.3v ONLY
- RTC Crystal circuit implemented for projects that require RTC, I may include a jumperable battery clip on the bottom of the board for untethered deeply embedded applications.
- Configurable PID Control Loops for real time control applications (the amount of simultaneous loops allowed is yet to be determined).
Specialized Applications (applications that set Hammerhead apart from the others)
- Analog sensor interfacing
- Biomedical Instrumentation
- Digital Signal Processing
- Multichannel real time DSP
- Open hackable DAC interface
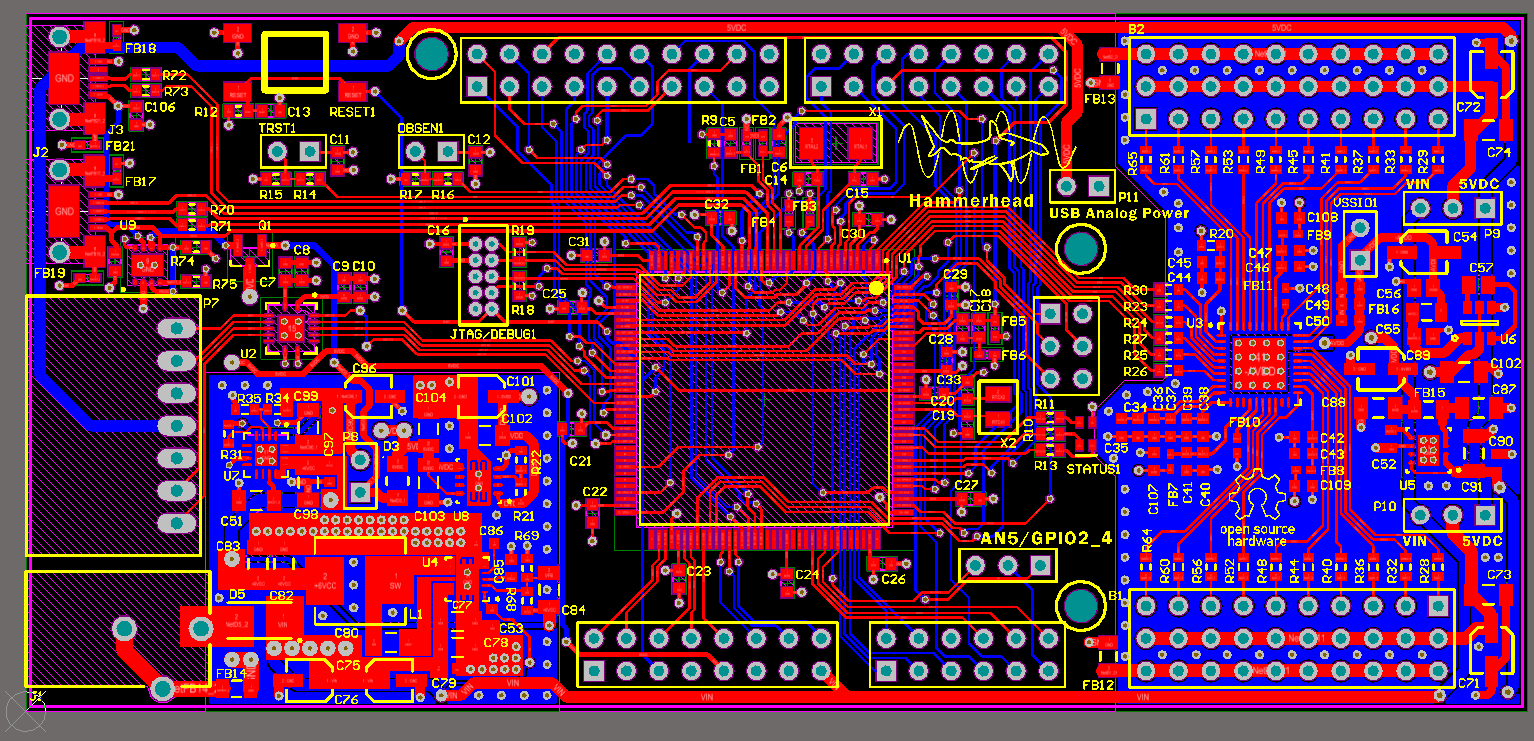
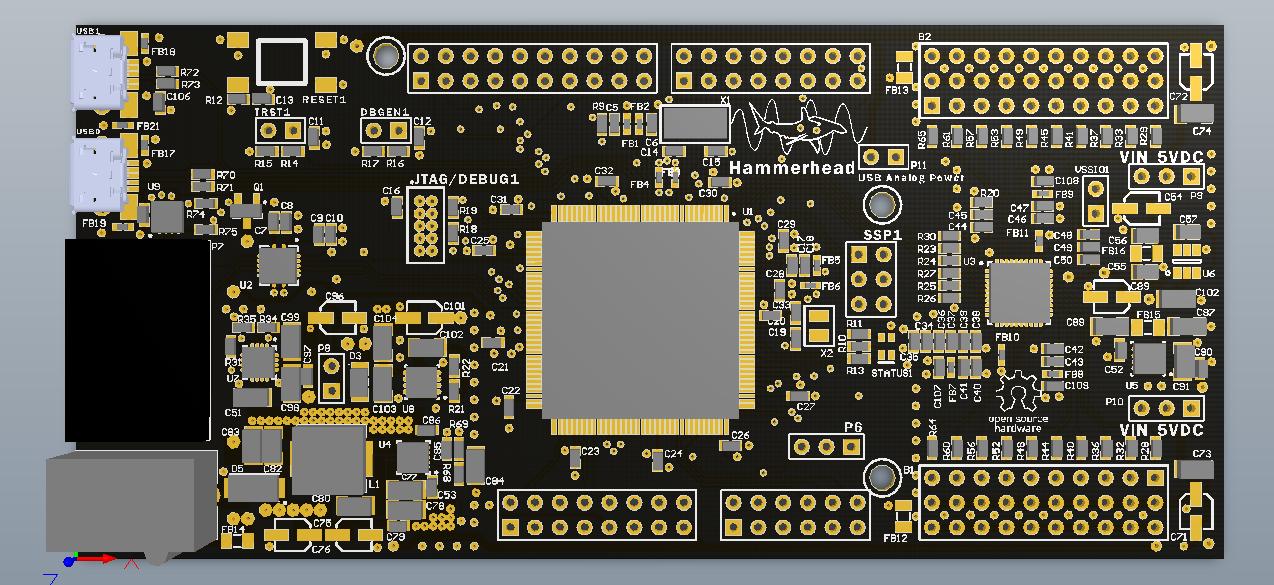
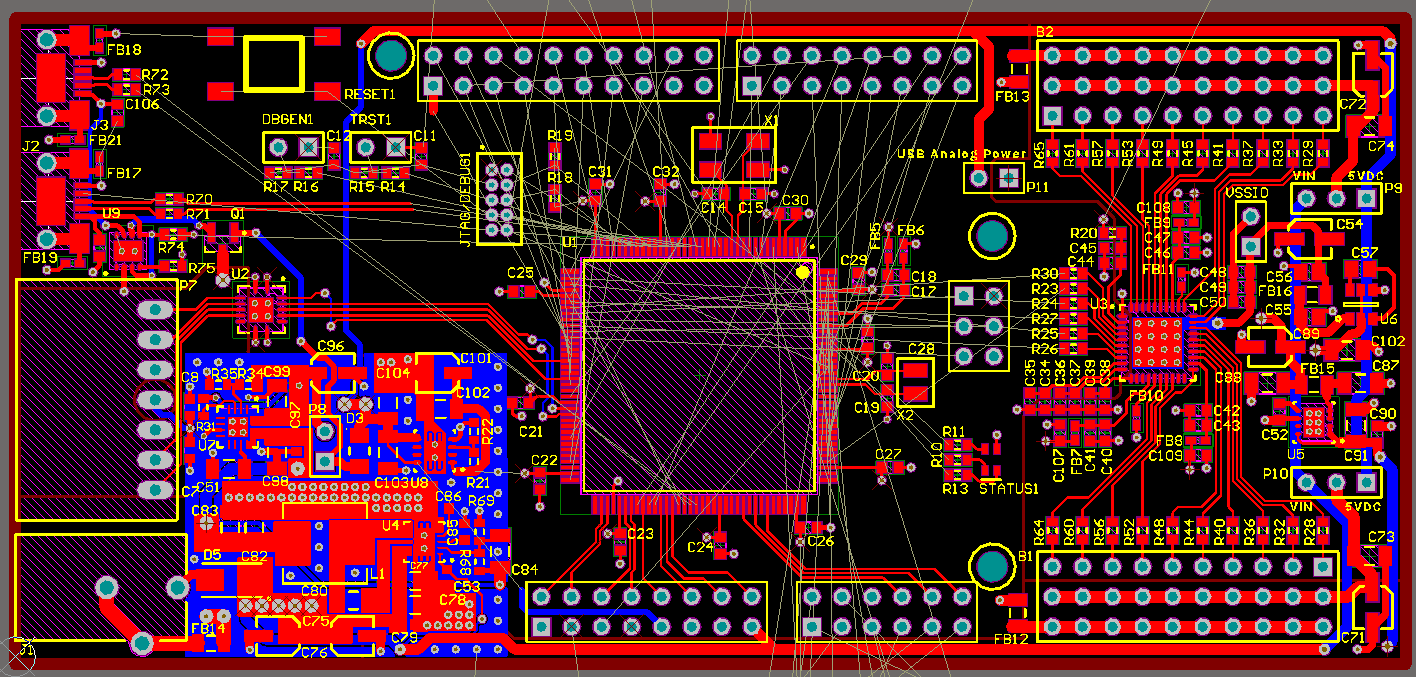
System Overview:
Project Overview Video
NOTE: Nothing has been built yet or prototyped, this is all I have so far, Many more updates to come this week as I have a bit more time to devote to this.
System Overview Document:
https://www.dropbox.com/s/2q579v7lte86vgt/HammerheadDesignDoc.pdf
More To Come!


 Flavio
Flavio
 Michael Welling
Michael Welling
 Roberto Innocenti
Roberto Innocenti
 Brandon Dunson
Brandon Dunson