 Marius Taciuc
Marius TaciucThe beginnings of an era
It was the winter of 2003, pretty much this time of year, 20 years ago. I was in my last year of technical high school. I was learning lots of electronic tips and tricks and I was also experimenting with programming in Borland Pascal 7.1. I was having a new 900MHz computer with a 6.4GB HDD and about 256MB of RAM.
I stumbled upon a magazine
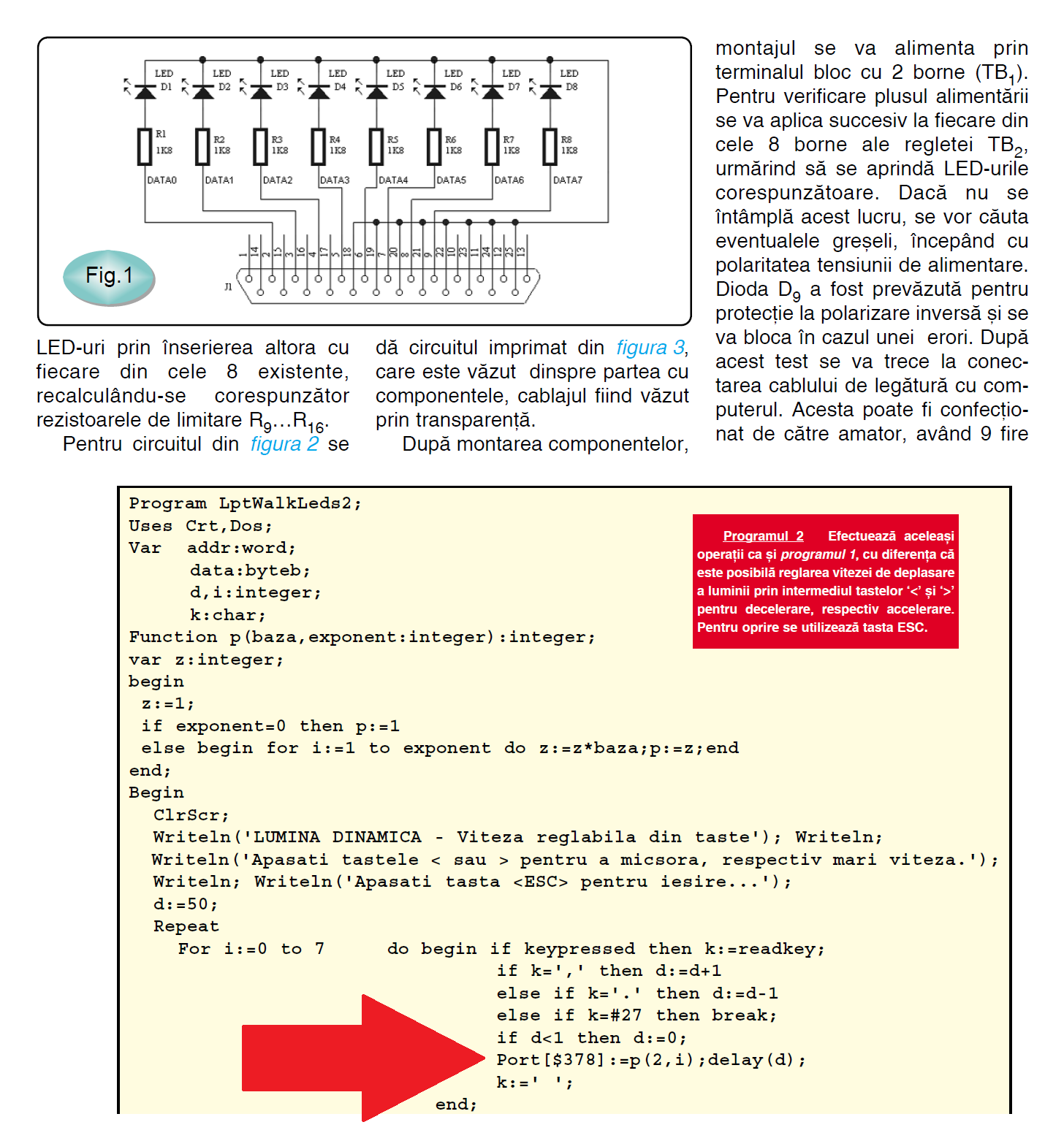
I was fascinated about the idea of having some electronic device driven by the computer as this was something you could only see in the SF movies back then. One day I cam across a technical Romanian electronics magazine which was having an article on how to drive some LEDs using the parallel port of the PC in order to make a vu meter for Windows 98.
(Credit: Conex Club magazine, year 2000, no 6. Romania)
It gave the schematic and it gave me the Borland code. In it was a line which taught me how to send information to the parallel port of the PC. I remember that, once I discovered this thing I was so excited, I couldn't sleep that night. I kept thinking that this was just the beginning of endless possibilities for me. I had the knowledge on how to build analog amplifiers, on how to use relays, on how to switch on grid lines by using logical signals and many more. Having them all submitted now to this new idea of owning up to 8 bits and 255 channels to drive all of them from the computer was just amazing. I was thinking that I could even build a robot. I was saying to myself: "wow, Marius, you could even build yourself a computer driven house system. Operate the blinds, turn on the light..." And that was long before the modern day notion of smart houses.
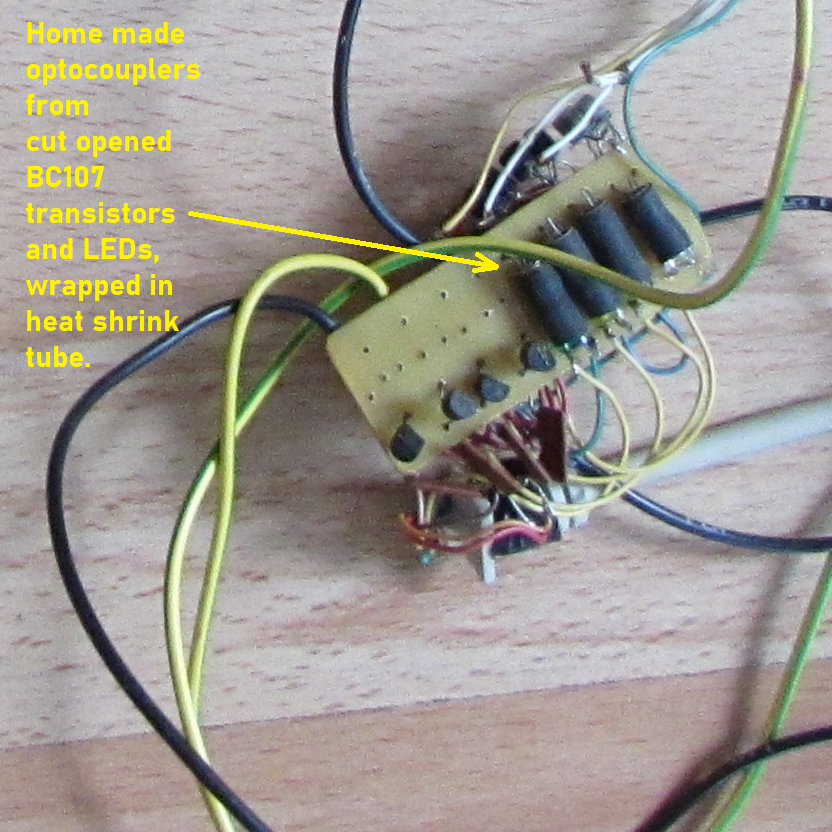
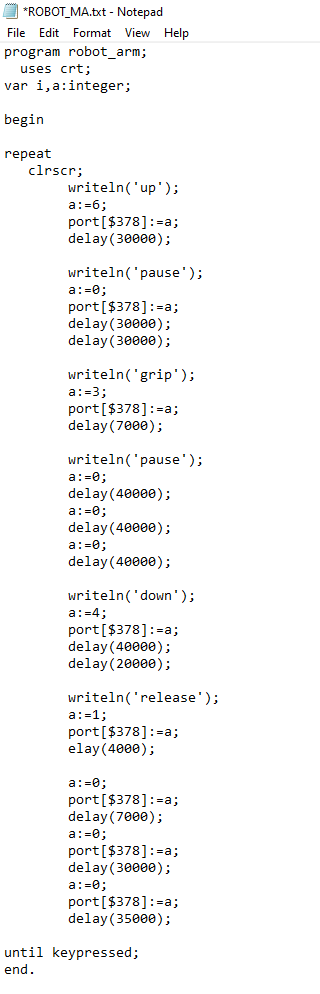
The next day I frankensteined together a small pcb with LEDs. Then I connected optocouplers to those LED lines and then I used the optocouplers to drive relays. I was at the peak of my happiness. I was telling my parents that I was building a robot arm to connect to my computer, but they didn't believe me. I remember now, judging the teenager memories through the mind of an adult, that they had nodded their heads, but they thought that I was exaggerating or day dreaming. Back then I wasn't even having access to materials. The only bits of hardware I was having were scrapped components from cassette tape players and telephone relays. I even had to build my own optocouplers by trimming off the heads of some metal BC107 transistors.
The fingertips were made of cassette tape pressure rollers, the plastic gears belonged to some old toys, the finger actuator motor came from a Walkman (if people still remember those) and the hand was made of refurbished Fr4 from old PCBs. The trickiest part of all was the forearm’s actuator which needed to be strong enough to lift the entire assembly. I had found an old actuator from a dismantled boiler.

It was a Honeywell 3-way valve motor. Those familiar with the model might remember that it was having an attached gearbox with a high gear ratio. It was only having a small problem: the motor was burned. I had to stick a rubber pad on the rotor’s case and to use an external motor with a shaft to drive it, but that worked... eventually.
Where dreams might take me
A few days later I went to my Digital Electronics teacher and told him that I wanted to participate to the National Scientific Communications contest. For those of you who are familiar with the Romanian context, and stumble upon this article, that was also known as the Stefan Procopiu contest.
The Pascal code was pretty simple. It would trigger the relays one by one and it would loop the movements of the arm in a repetitive cycle. The robotic arm would reach down, close its moving thumb, move up, move to the left, move to the right, move down again and release its grab. That day I brought my project to school for the first time and showed it to my teacher, everything worked perfectly....
Read more »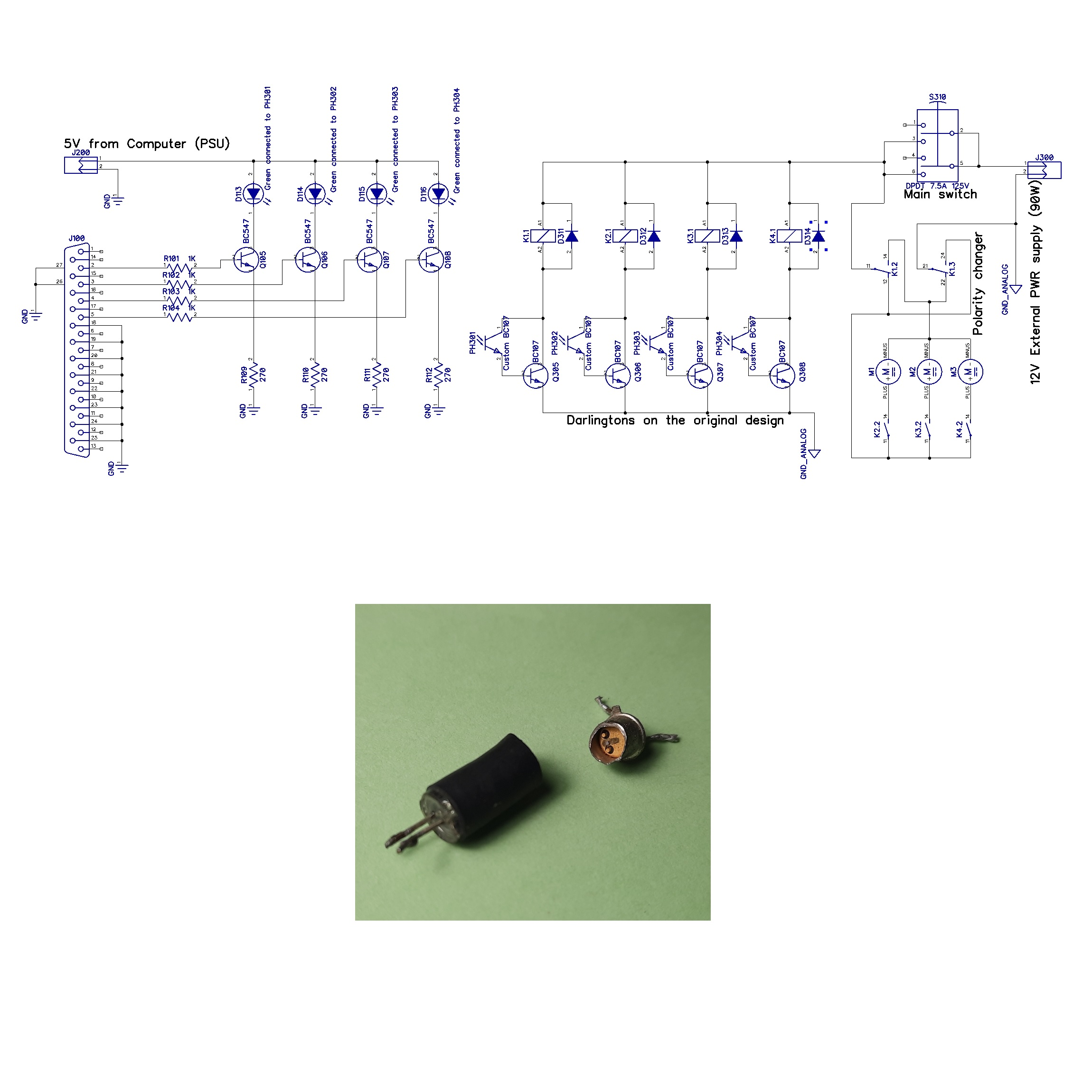



 Rudolph
Rudolph
 Rodolfo
Rodolfo

 MECHANICUS
MECHANICUS
This is soooo beautiful. :)