0%
0%
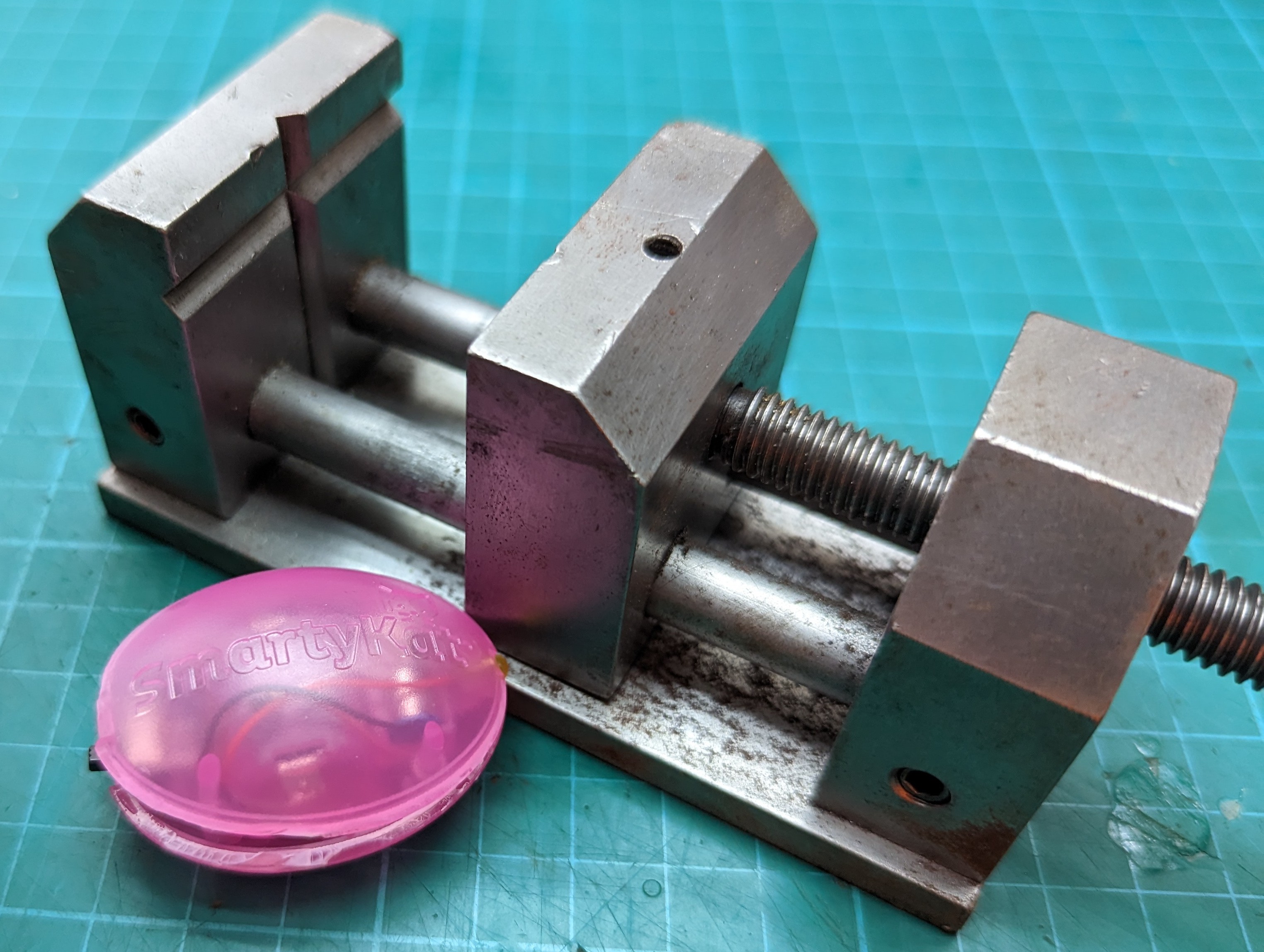
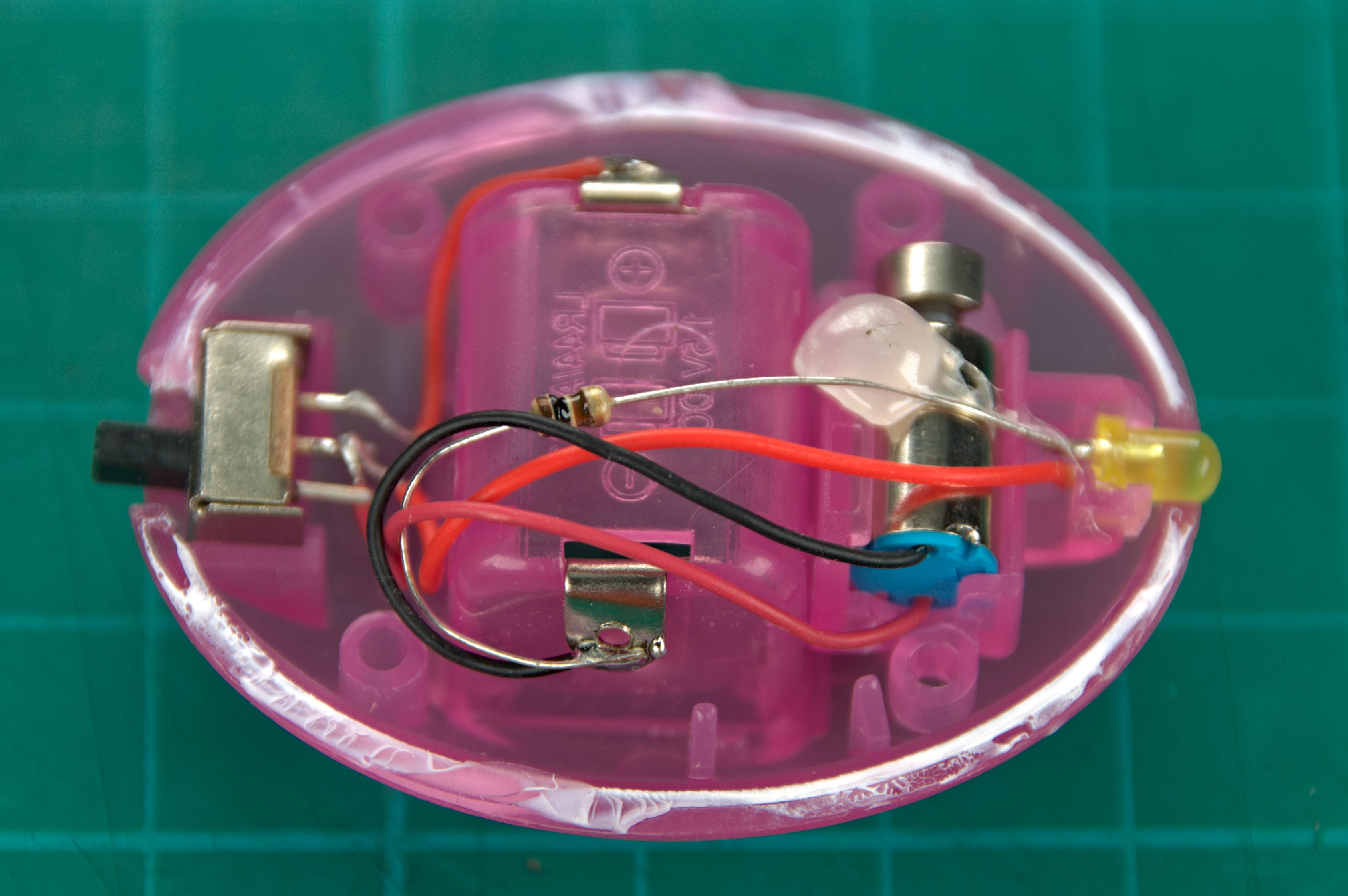
Smart SmartyKat Toy
Making the SmartyKat Crazy Cruiser smart to lower battery usage.
 leumasyerrp
leumasyerrpBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Colin MacKenzie
Colin MacKenzie
 cheetah_henry
cheetah_henry
 Josh
Josh
 bornach
bornach
Thank you; I found some stuff in the meantime but having to buy a programmer for >$100 or make one (not simple!) has dampened my enthusiasm.