Andrew Benson
Andrew Benson-
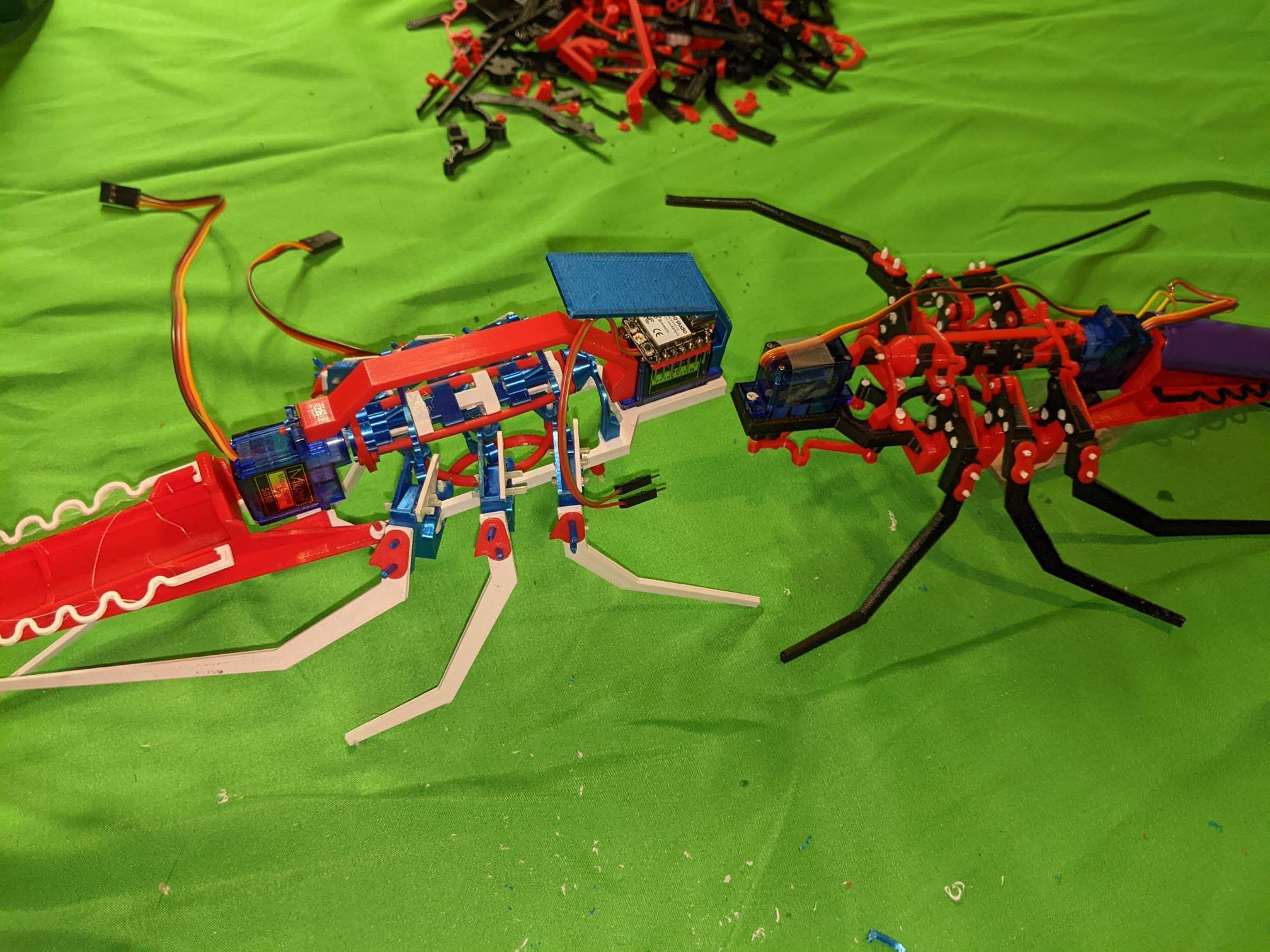
mk 4, version 30
05/05/2023 at 18:31 • 0 commentsWe hit the "Fusion" version of 30 just as we printed the latest model - it was interesting to find out that the fusion 360 model posted earlier in the logs stays up to date with the latest changes. we're figuring out how to version control between that, the thingiverse page, and this; such will be a problem to solve. The first match was last night, video to follow
![]()
-
It takes two to 'rassle
04/28/2023 at 01:58 • 0 comments![]()
-
Assembly Video
04/26/2023 at 06:52 • 0 comments -
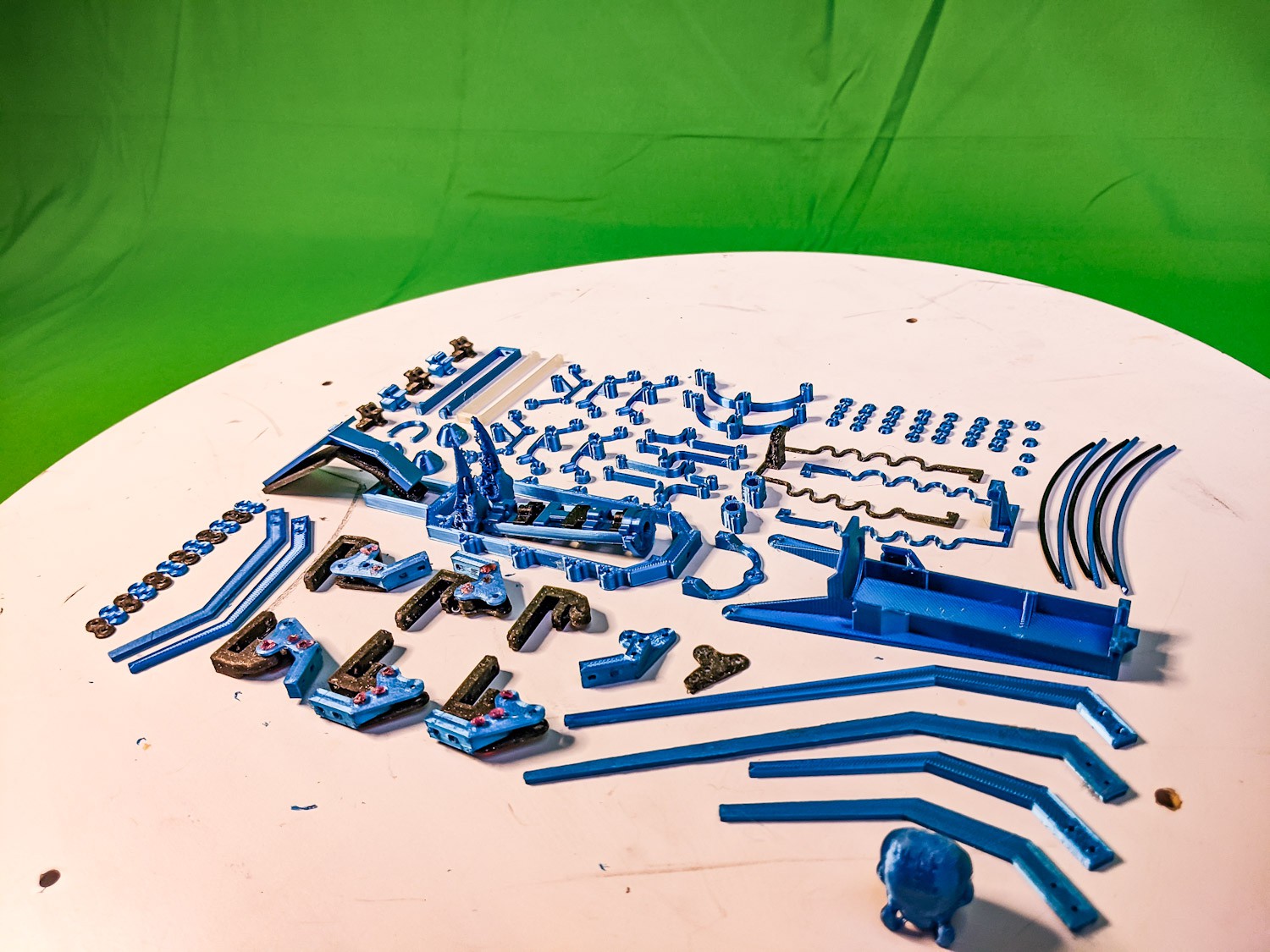
Sharing ≥ Caring
04/01/2023 at 01:40 • 0 comments -
Initial code test
03/29/2023 at 03:26 • 0 commentsIt seems like the XIAO esp32c3 does better with the PWM on channel 9, rather than 10 or 7. Still trying to figure out how to run two servos at the same time.
Running this test code to try out different pins for the XIAO:/********* Derived from Rui Santos Complete project details at http://randomnerdtutorials.com Project changed to use "pwmWrite" library *********/ #include <WiFi.h> #include <pwmWrite.h> Pwm pwm = Pwm(); // create servo object to control a servo // twelve servo objects can be created on most boards // GPIO the servo is attached to static const int servoPin = 10; // Replace with your network credentials const char* ssid = "replace_with_SSID"; const char* password = "replace_with_PW"; // Set web server port number to 80 WiFiServer server(80); // Variable to store the HTTP request String header; // Decode HTTP GET value String valueString = String(5); int pos1 = 0; int pos2 = 0; // Current time unsigned long currentTime = millis(); // Previous time unsigned long previousTime = 0; // Define timeout time in milliseconds (example: 2000ms = 2s) const long timeoutTime = 2000; void setup() { Serial.begin(115200); // Connect to Wi-Fi network with SSID and password Serial.print("Connecting to "); Serial.println(ssid); WiFi.begin(ssid, password); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } // Print local IP address and start web server Serial.println(""); Serial.println("WiFi connected."); Serial.println("IP address: "); Serial.println(WiFi.localIP()); server.begin(); } void loop(){ WiFiClient client = server.available(); // Listen for incoming clients if (client) { // If a new client connects, currentTime = millis(); previousTime = currentTime; Serial.println("New Client."); // print a message out in the serial port String currentLine = ""; // make a String to hold incoming data from the client while (client.connected() && currentTime - previousTime <= timeoutTime) { // loop while the client's connected currentTime = millis(); if (client.available()) { // if there's bytes to read from the client, char c = client.read(); // read a byte, then Serial.write(c); // print it out the serial monitor header += c; if (c == '\n') { // if the byte is a newline character // if the current line is blank, you got two newline characters in a row. // that's the end of the client HTTP request, so send a response: if (currentLine.length() == 0) { // HTTP headers always start with a response code (e.g. HTTP/1.1 200 OK) // and a content-type so the client knows what's coming, then a blank line: client.println("HTTP/1.1 200 OK"); client.println("Content-type:text/html"); client.println("Connection: close"); client.println(); // Display the HTML web page client.println("<!DOCTYPE html><html>"); client.println("<head><meta name=\"viewport\" content=\"width=device-width, initial-scale=1\">"); client.println("<link rel=\"icon\" href=\"data:,\">"); // CSS to style the on/off buttons // Feel free to change the background-color and font-size attributes to fit your preferences client.println("<style>body { text-align: center; font-family: \"Trebuchet MS\", Arial; margin-left:auto; margin-right:auto;}"); client.println(".slider { width: 300px; }</style>"); client.println(""); // Web Page client.println("</head><body><h1>ESP32 with Servo</h1>"); client.println("<p>Position: <span id=\"servoPos\"></span></p>"); client.println("<input type=\"range\" min=\"0\" max=\"180\" class=\"slider\" id=\"servoSlider\" onchange=\"servo(this.value)\" value=\""+valueString+"\"/>"); client.println("<script>var slider = document.getElementById(\"servoSlider\");"); client.println("var servoP = document.getElementById(\"servoPos\"); servoP.innerHTML = slider.value;"); client.println("slider.oninput = function() { slider.value = this.value; servoP.innerHTML = this.value; }"); client.println("$.ajaxSetup({timeout:1000}); function servo(pos) { "); client.println("$.get(\"/?value=\" + pos + \"&\"); {Connection: close};}</script>"); client.println("</body></html>"); //GET /?value=180& HTTP/1.1 if(header.indexOf("GET /?value=")>=0) { pos1 = header.indexOf('='); pos2 = header.indexOf('&'); valueString = header.substring(pos1+1, pos2); //Rotate the servo pwm.writeServo(servoPin,valueString.toInt()); Serial.println(valueString); } // The HTTP response ends with another blank line client.println(); // Break out of the while loop break; } else { // if you got a newline, then clear currentLine currentLine = ""; } } else if (c != '\r') { // if you got anything else but a carriage return character, currentLine += c; // add it to the end of the currentLine } } } // Clear the header variable header = ""; // Close the connection client.stop(); Serial.println("Client disconnected."); Serial.println(""); } }
Robo Roach Wrestling
A sumo style wrestling league for hexapod robots