 Mike Rigsby
Mike RigsbyFor the first test, the component configuration looked like this:
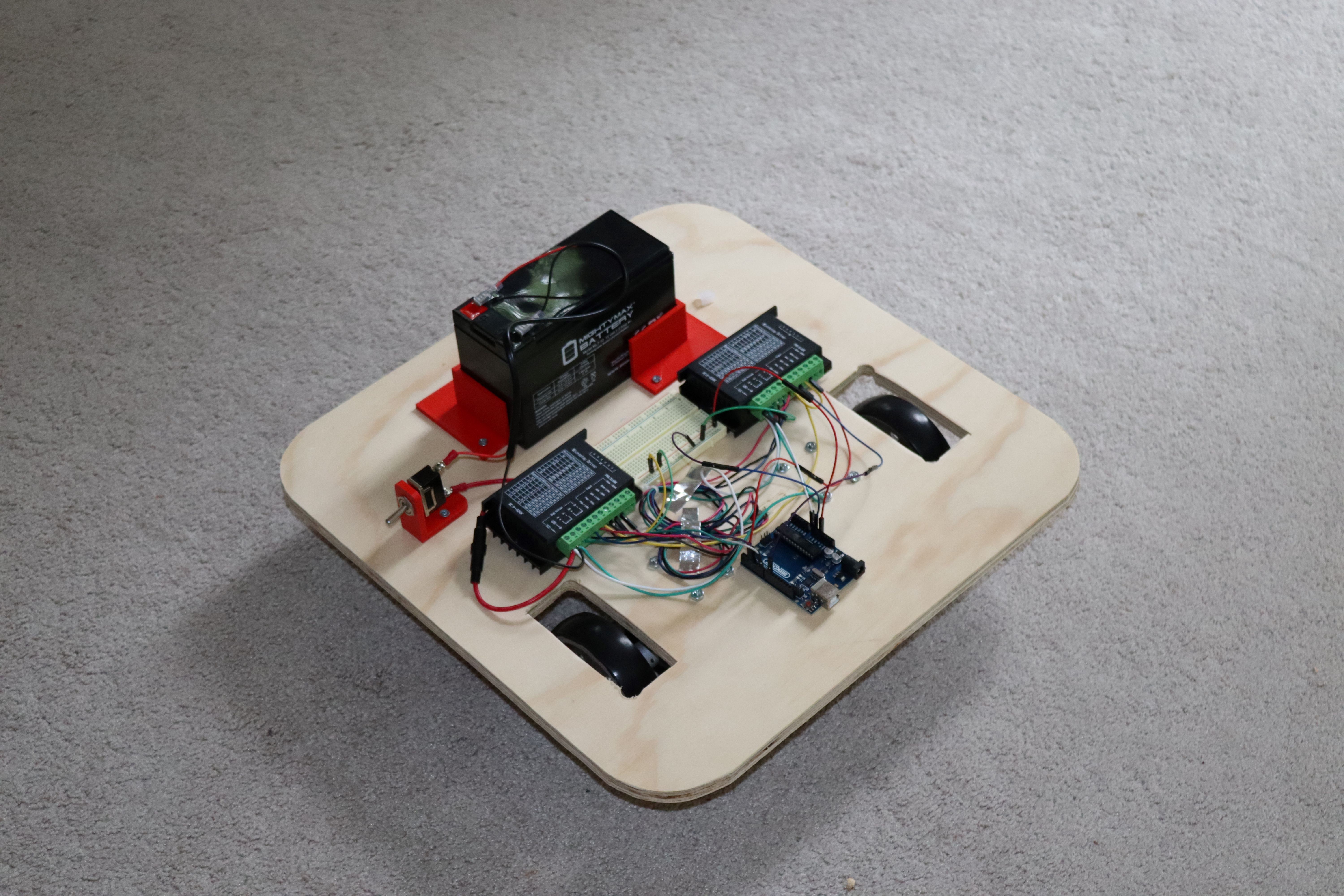
This works, but the 4.5 pound battery (over the caster wheel) creates a weight imbalance such that the front wheels tend to slip when making turns.
The solution is to move the battery closer to the drive wheels. This is actually consistent with Astro robot, where most of the weight is in the front with very little toward the cargo bay/caster wheel.

Sometimes it is easier to "see mistakes in action" rather than "planning for all possible faults in advance."
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.