 Juan-Antonio Søren E.P.
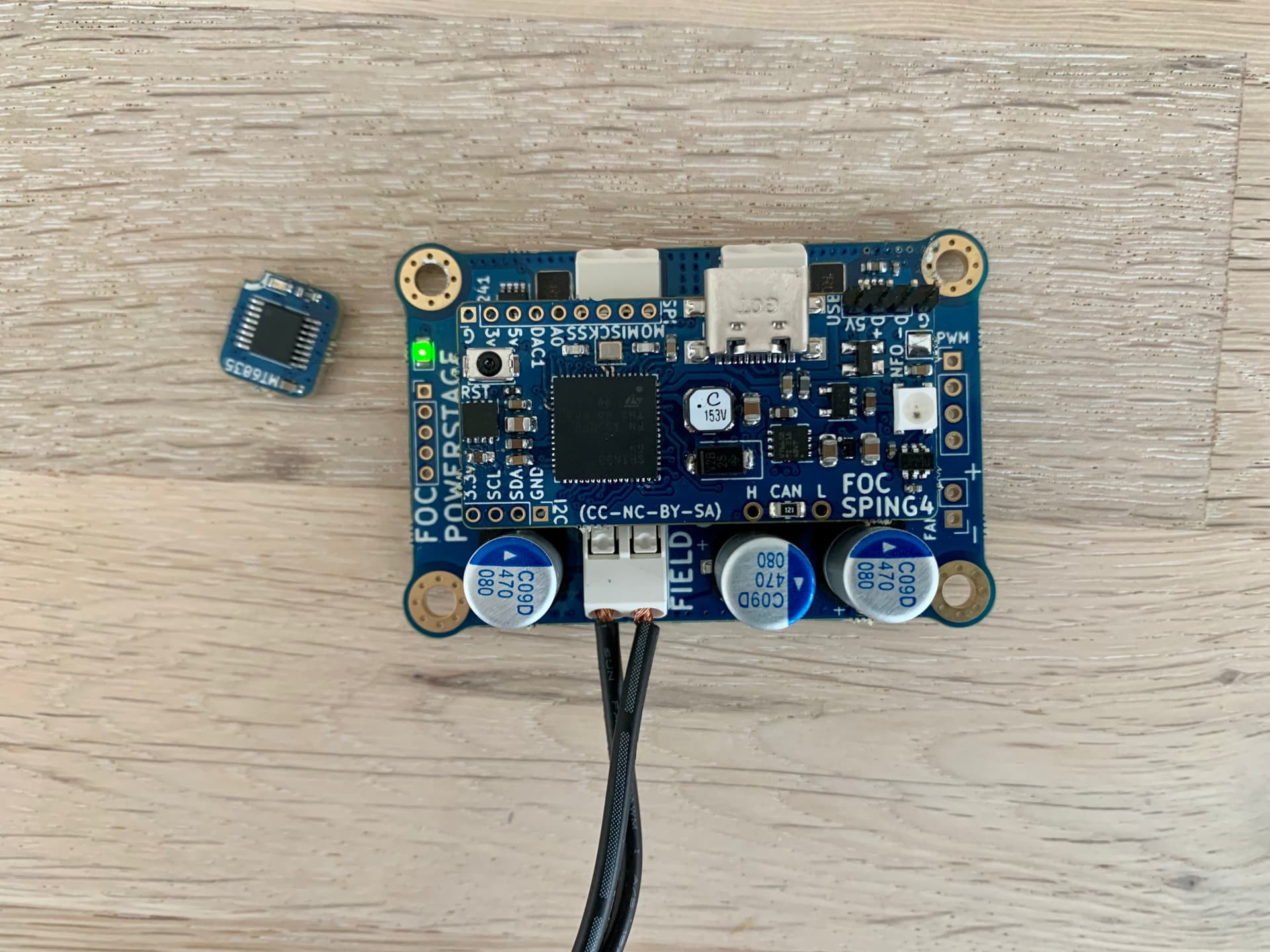
Juan-Antonio Søren E.P.Running SimpleFOC with trapezoidal-planner. Max velocity set to 50rad/s, acceleration and de-acceleration set to 25rad/s/s
0%
0%
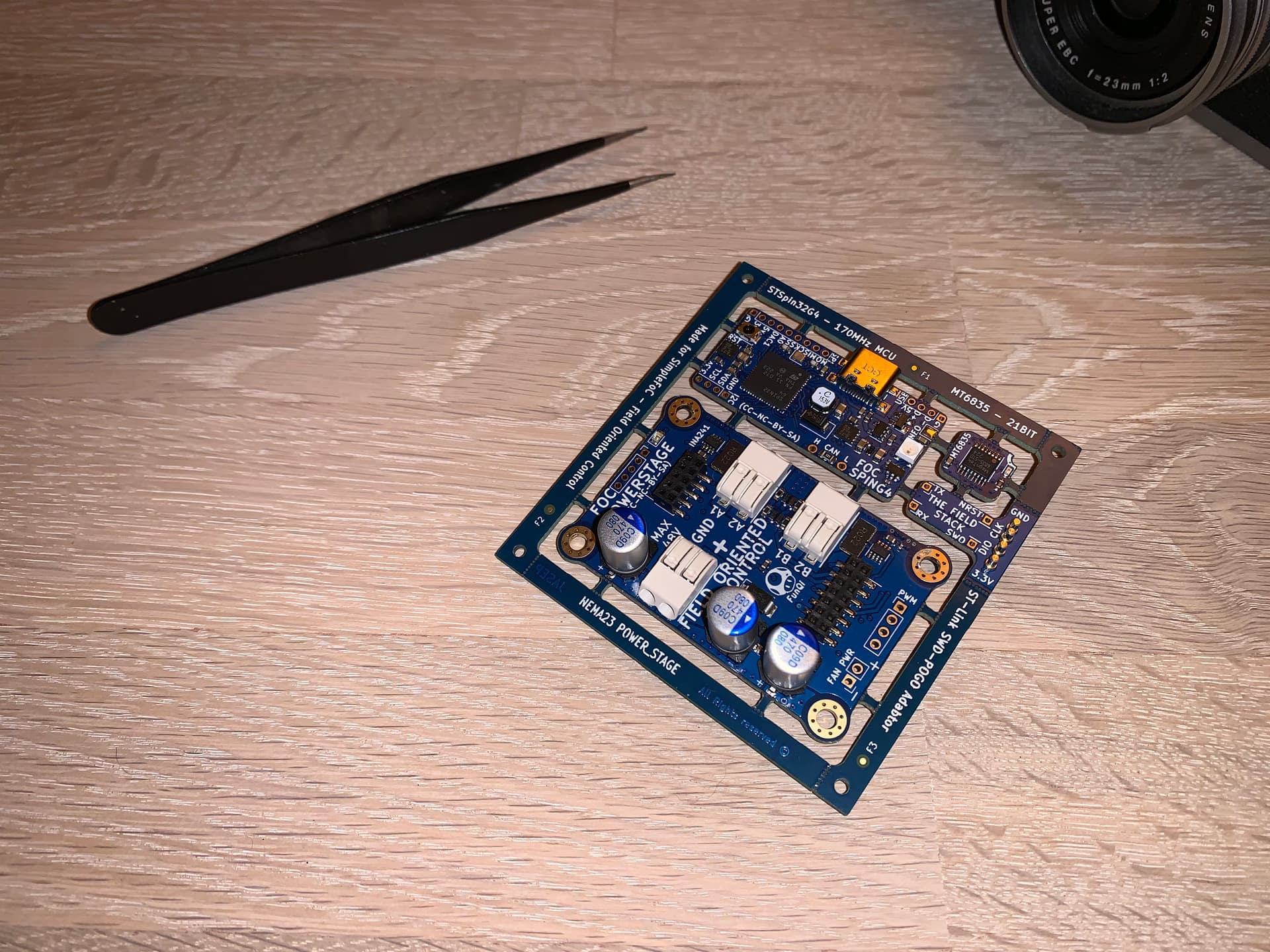
The Field Stack - NEMA23/34 FOC
If we win the Hackaday price, we will make BETA give aways. FOC field-oriented control for NEMA23/34
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

Love the form factor for this! Ive been wanting a stepper motor driver with an esp32 so the servo system can recieve commands via a "normal" web interface, does this wifi / bluetooth?