 Reimu NotMoe
Reimu NotMoeIntroduction
The LoShark is a USB key-sized device, designed with a keen focus on offering robust LoRa connectivity and debugging capabilities. It's engineered to operate both independently and in conjunction with a PC, opening up a versatile range of use-cases.
Video demo:
The software and design files are available in our GitHub repo.
Interested in getting one? Please visit our store.
Key Features
Compact and Portable Design
Designed with a USB key form factor, LoShark can be easily plugged into a PC or operate independently when connected to a USB power bank. This design provides unparalleled convenience and portability. It also has a nice plastic enclosure.

▲ PCB of the LoShark. Our X1501 Pico SoM is near the USB port. The HJ-68LR SiP is near the SMA port.

▲ LoShark connected to a mini laptop. A perfect combo for outdoors LoRa testing.
JavaScript Programmability with Resonance
The LoShark's primary strength is its ability to execute JavaScript (ES2015) through our runtime, Resonance. It's still in alpha state, and it will be open sourced with a free software license soon later. You can join our Discord for alpha testing at this moment.
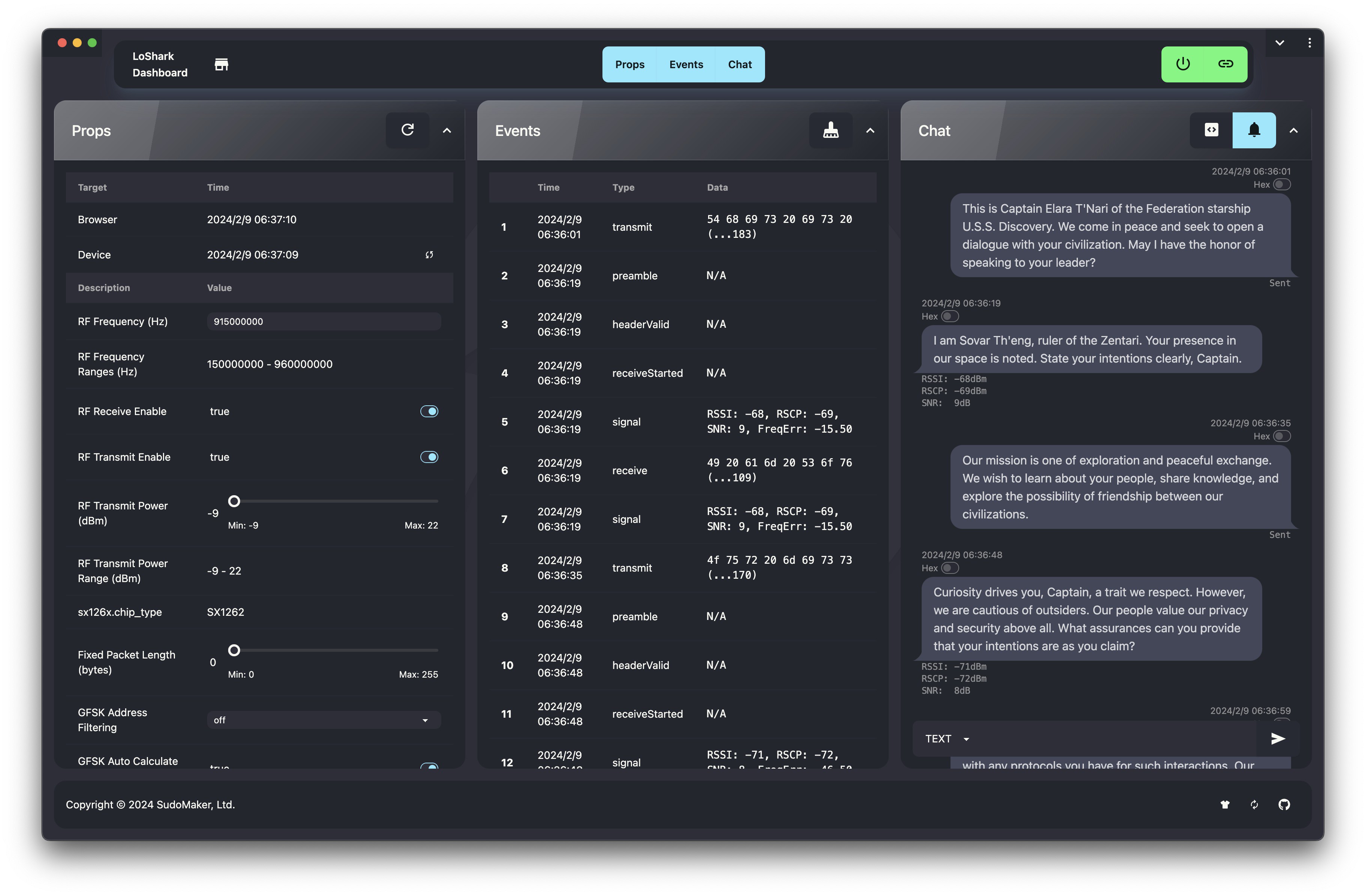
This feature enables users to program specific tasks, serving as a powerful tool for LoRa debugging, such as capturing packets and sending LoRa messages either manually or programmatically, at minimal delay.
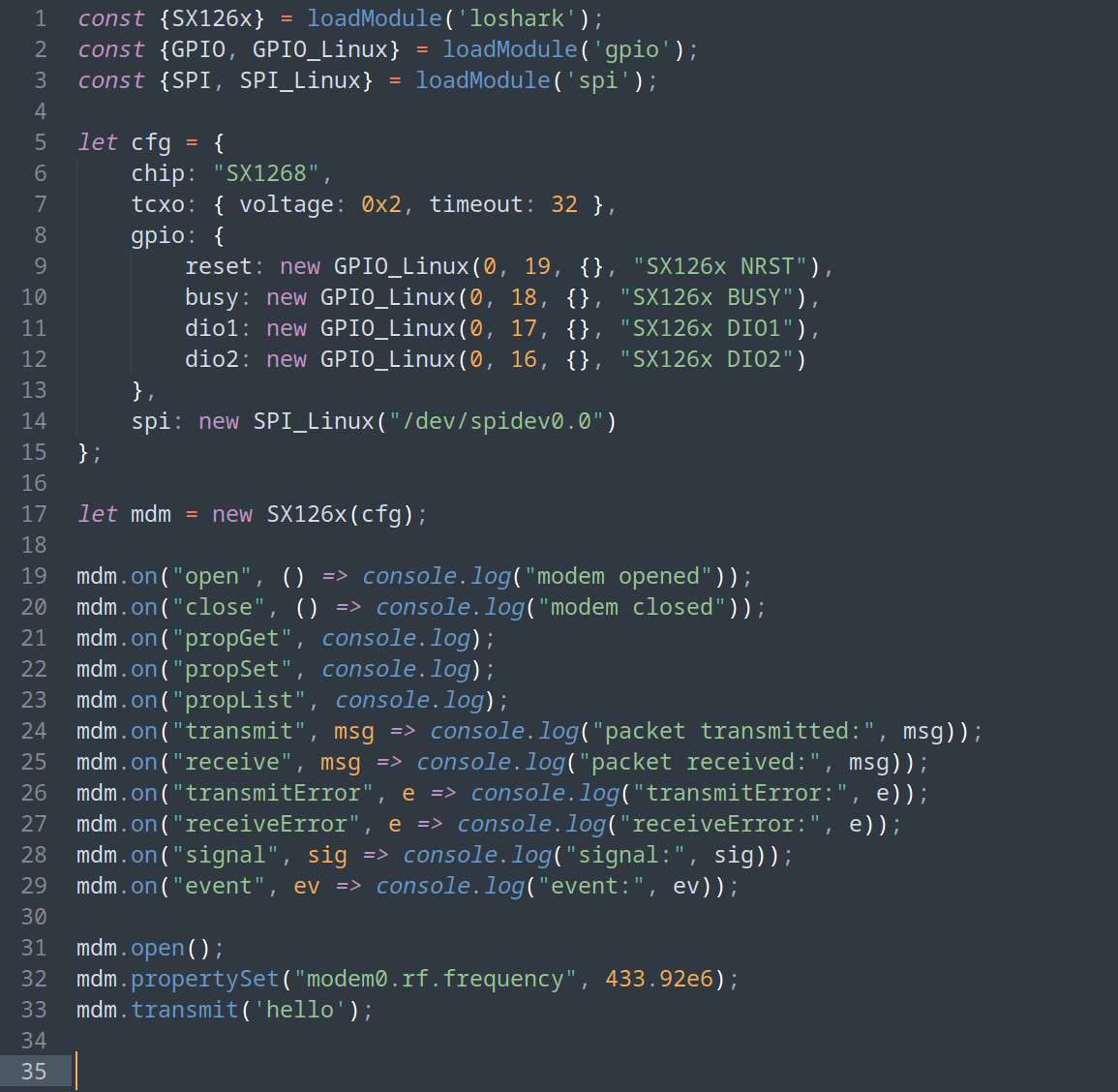
▲ Demo JavaScript application for the LoShark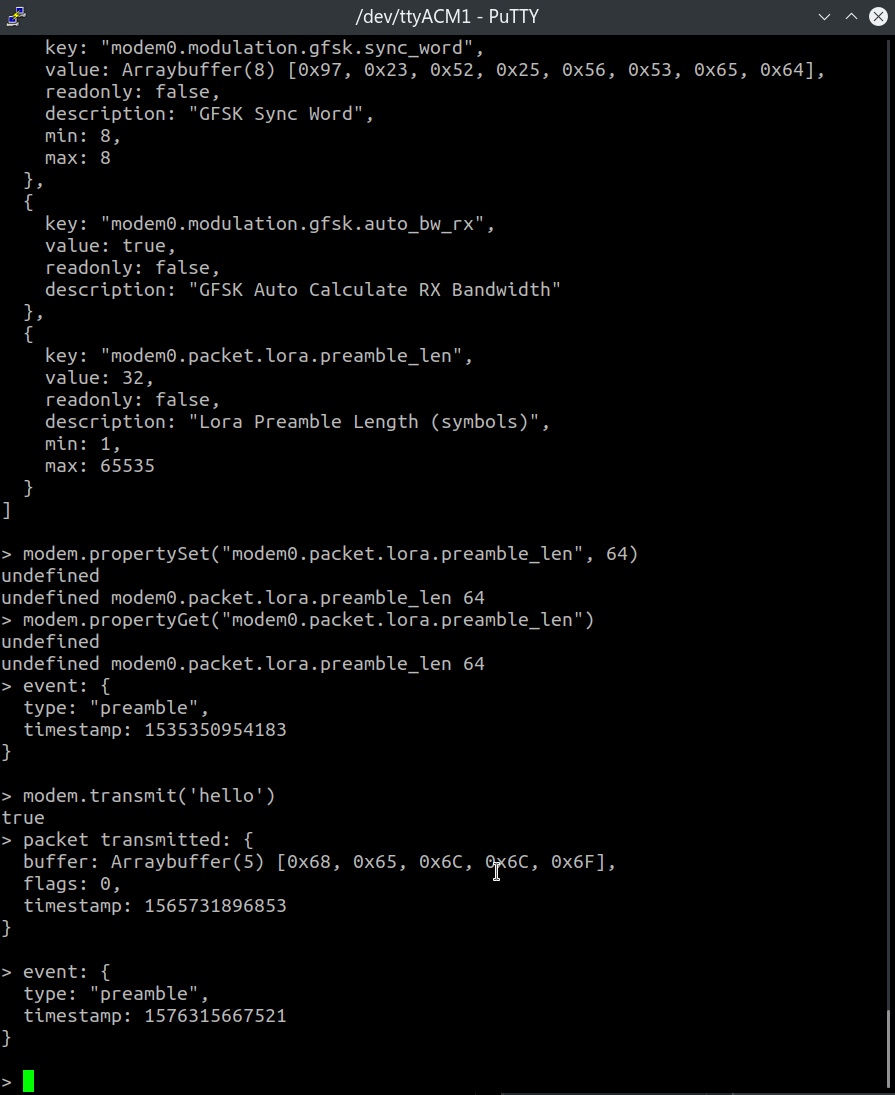
Linux Support
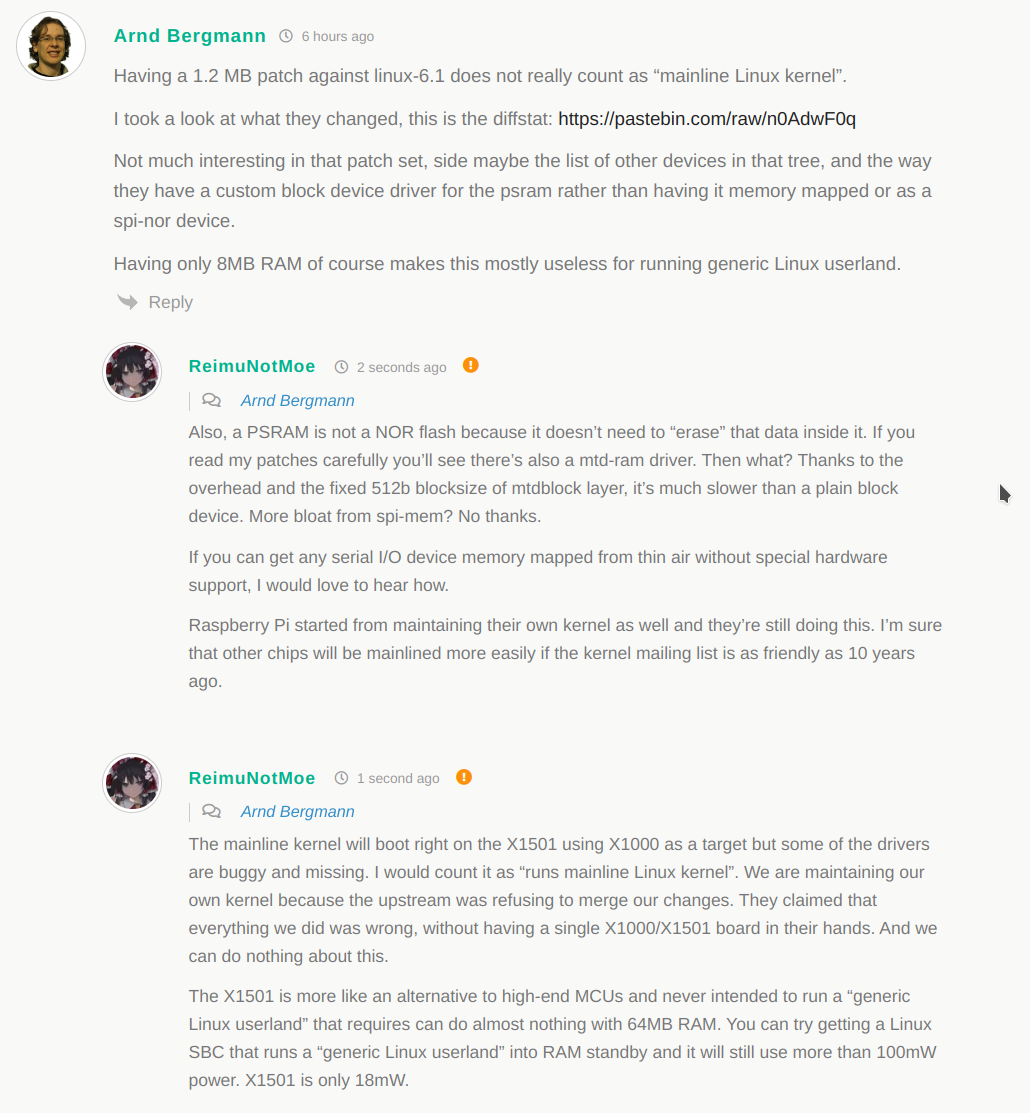
The LoShark runs mainline Linux, allowing users to write bare bone Linux applications in C and C++. It's possible to expand the device's capabilities far beyond its size with careful programming.
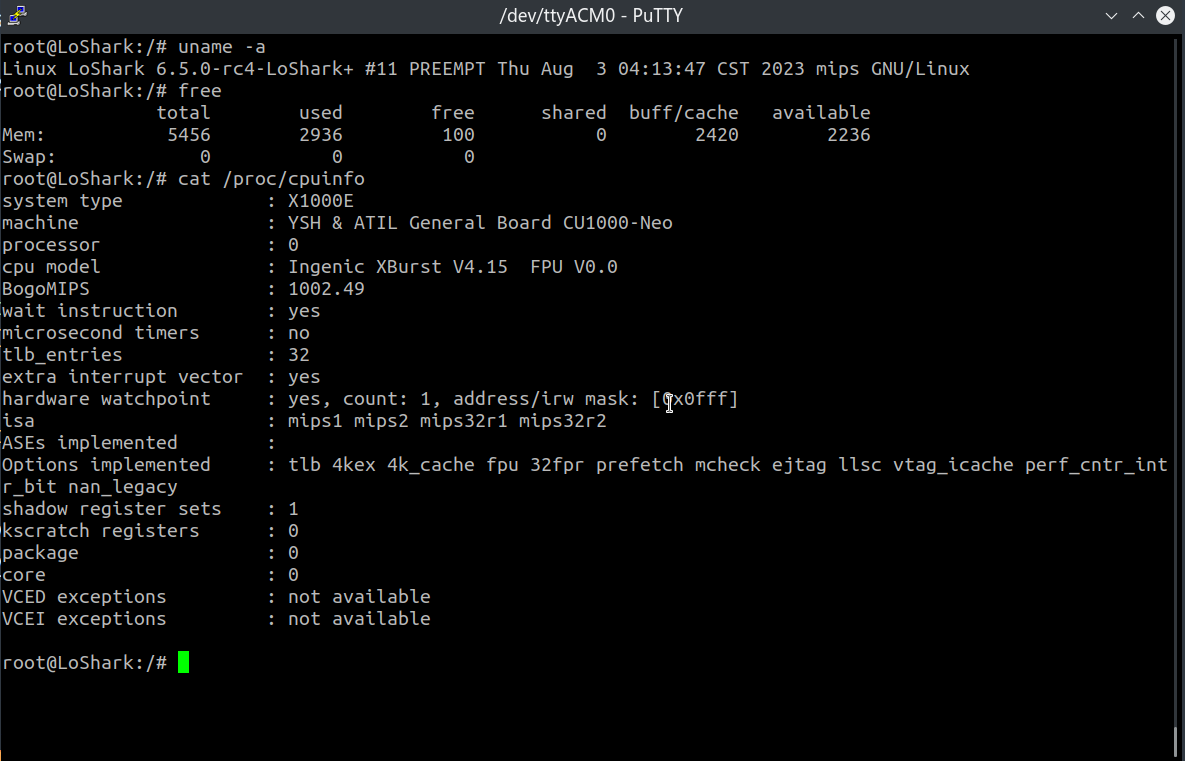
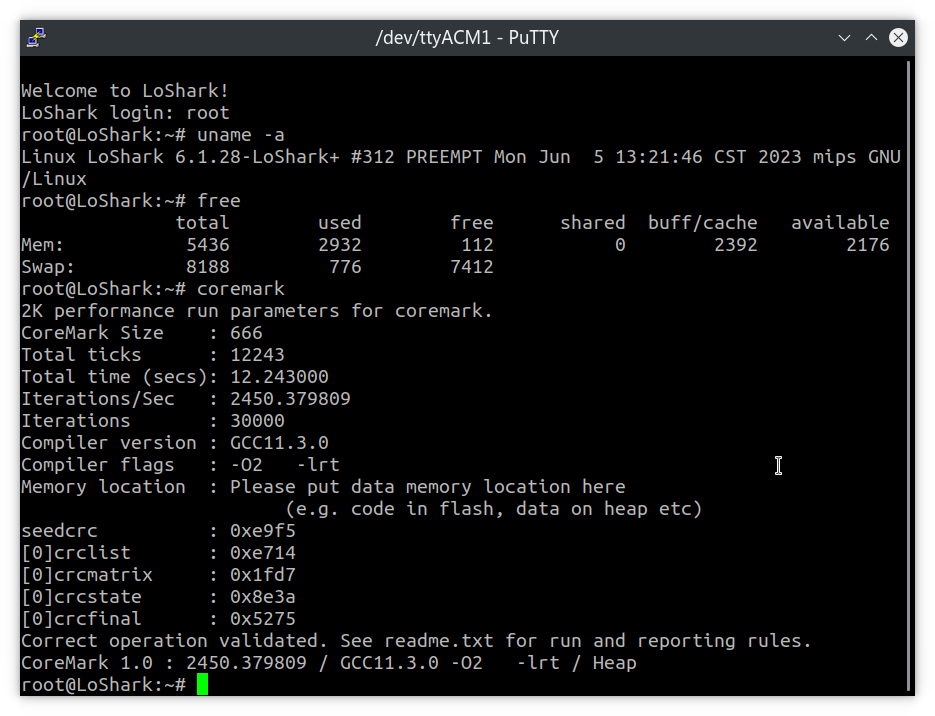 ▲ Linux is running inside the LoShark
▲ Linux is running inside the LoSharkMemory and Storage
With 8MB of DRAM, 8MB of PSRAM, and additional flash storage starting from 128MB to a maximum of 4GB, LoShark packs a punch in memory capacity for its size. This is very useful for data collection tasks, such as logging every received LoRa packet, alongside with the signal status and time.
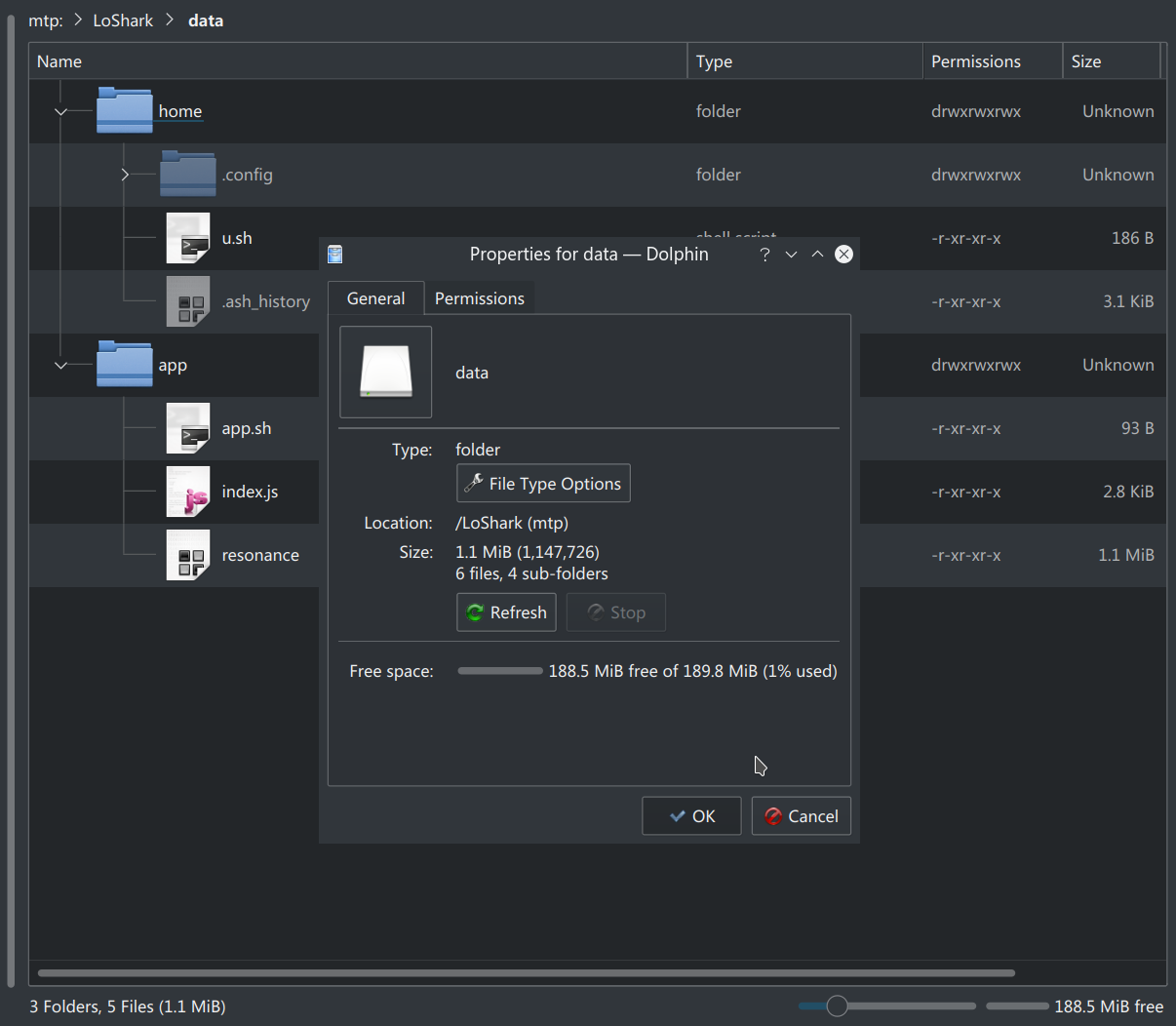 ▲Transferring files between LoShark and PC is made easy with the MTP protocol
▲Transferring files between LoShark and PC is made easy with the MTP protocol Energy Efficient
LoShark operates at a low power consumption of 150mW while plugged into a PC and not transmitting, making it an energy-efficient solution for your LoRa needs.
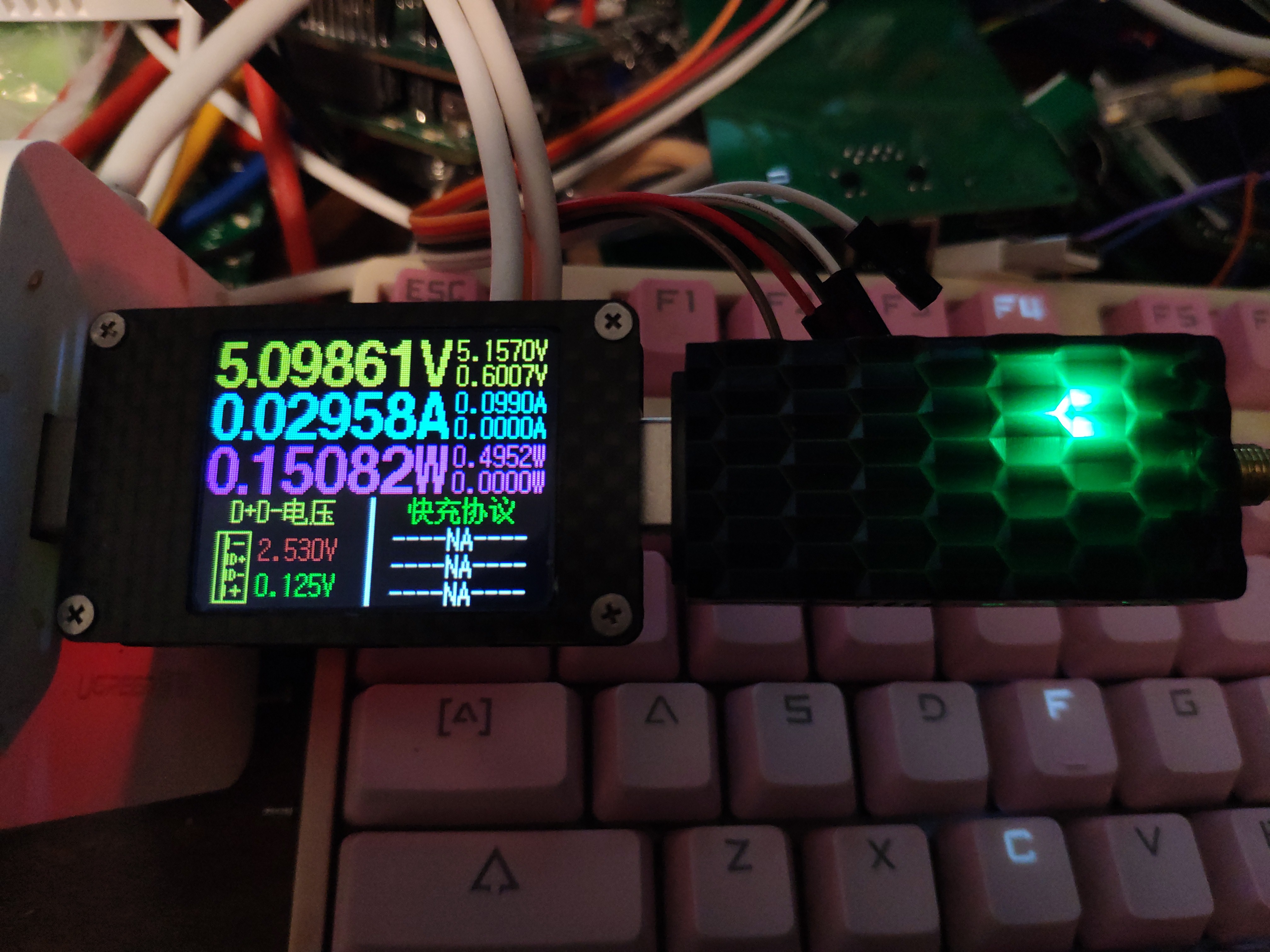
▲ Power consumption of the LoShark. It can be further reduced by turning off the bright RGB LED.
X1501 Pico SoM
Featuring our X1501 Pico System on Module (SoM), the LoShark is powered by a MIPS32r2 RISC processor, with a full-featured hardware FPU, enabling users to implement complex algorithms without worrying about performance, such as audio codecs like Codec2 and Opus, and software-based error correction codes such as DSSS and LDPC.
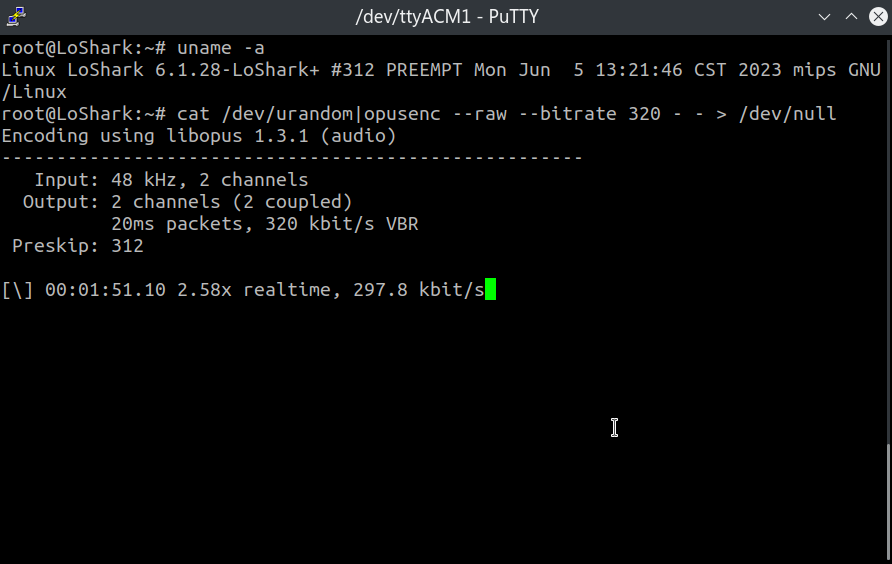 ▲ LoShark is capable of encoding 320kbps stereo Opus audio at 2.5x realtime speed
▲ LoShark is capable of encoding 320kbps stereo Opus audio at 2.5x realtime speedStandard SMA Socket
LoShark uses a standard SMA-F socket for RF connectivity, allowing users to easily swap antennas or connect to a power amplifier.

▲ LoShark and different compatible antennas
Real-Time Clock
The device includes an RTC, holding time configurations for at least 2 days, perfect for configuring on a PC and then operating separately with a power bank.
Programmable RGB LED Indicator
The device includes a programmable RGB LED indicator accessible via I2C, providing visible feedback and status indications to the user.

▲ LoShark doing data collection to its internal flash storage while being powered by a power bank





Ok this device working with reticulum? https://reticulum.network/manual/interfaces.html Please make a example