Nicolas Schurando
Nicolas Schurando-
Figuring out the inside
08/08/2023 at 10:00 • 0 commentsI have an initial shape I'm happy with, but now comes the difficult task of figuring out the inside. The tip will be dictating a lot of the design as its insertion distance is almost 3 cm long.
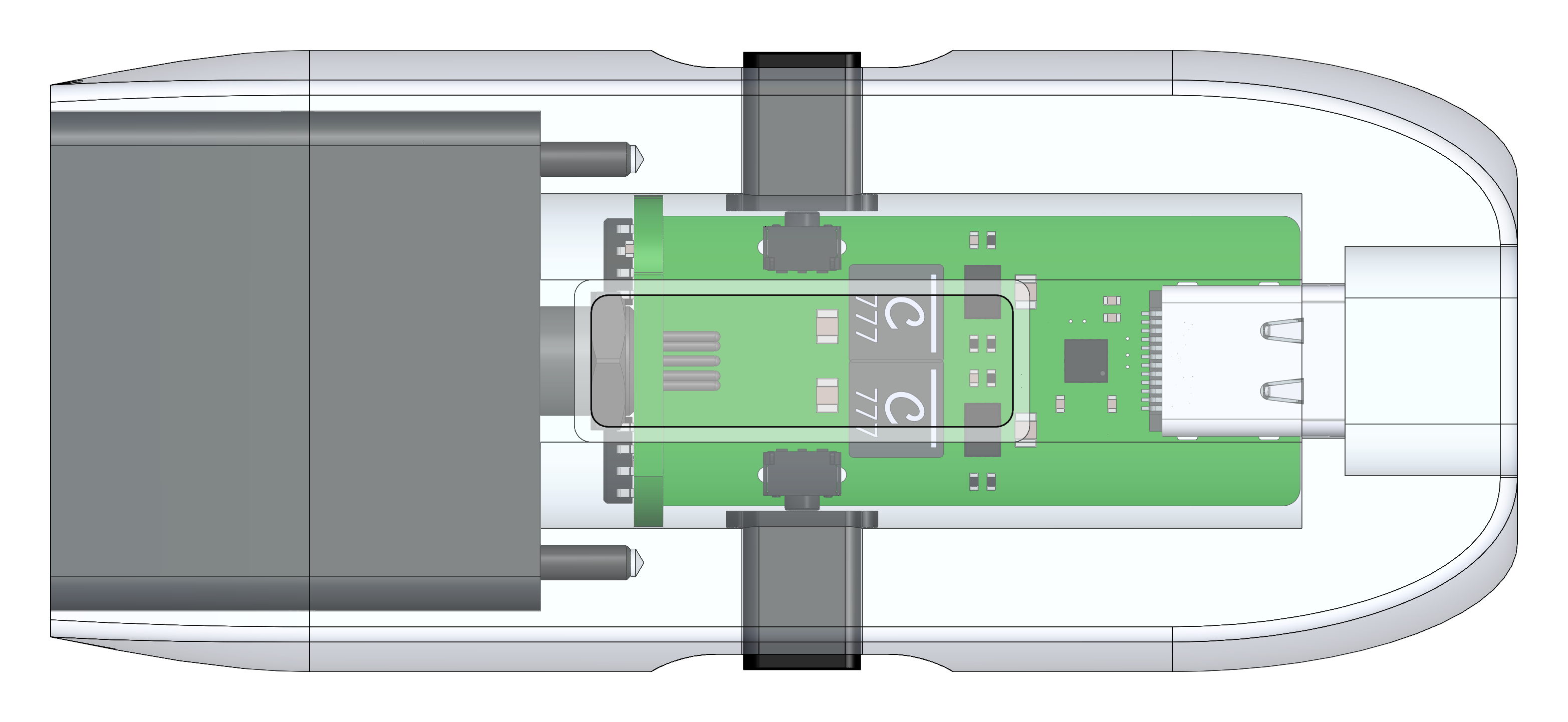
I'm favoring a mostly uni-body design. The main aluminum part will have its opening closed by a plastic piece where the tip mates; I'm hoping for plastic to provide a smoother insertion of the tip.
![]()
Because of the mating connector only existing in a vertical configuration, the electronics are composed of two boards, at a right angle, joined by solder. Routing of the boards is next, stay tuned!
-
Giving it a shape
08/08/2023 at 09:21 • 0 commentsTaking into account the dimensions of the tip, and the curvature of it's grip, I settled on 85mm for the length of the body.
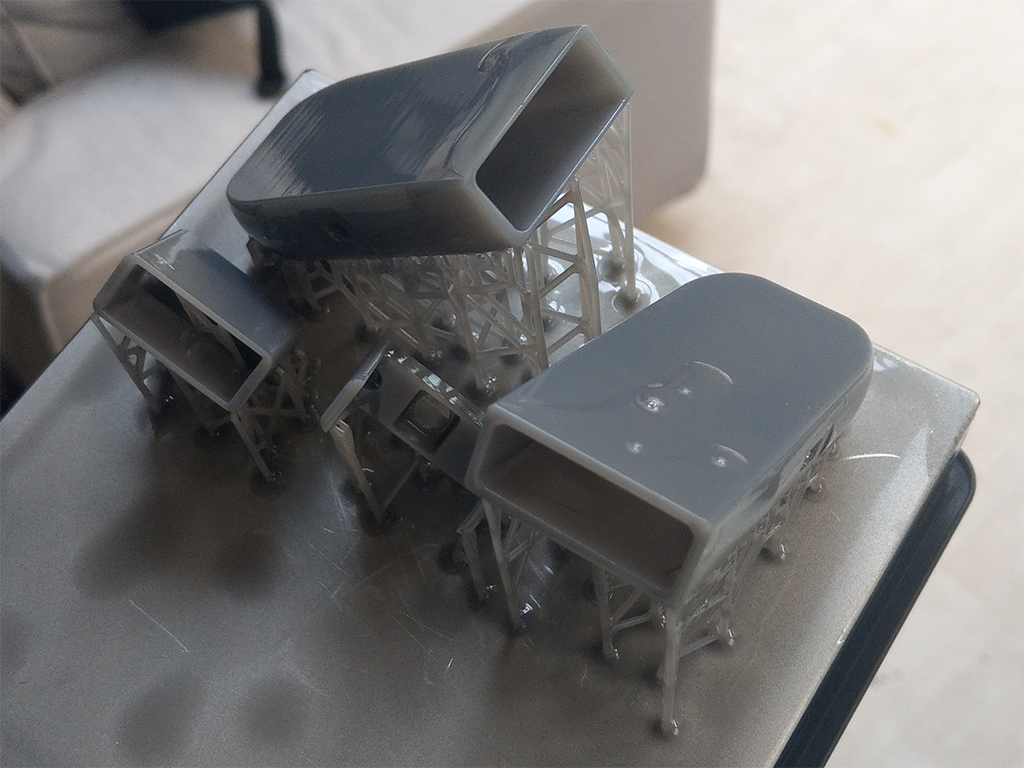
I printed in resin a first prototype and was seduced immediately. It feels great in the hand and although somewhat far, buttons are still accessible when needed. Unless I need to shift components on the PCB, I'll stick to this design.
Photos below.
![]()
![]()
-
Reverse engineering the connector
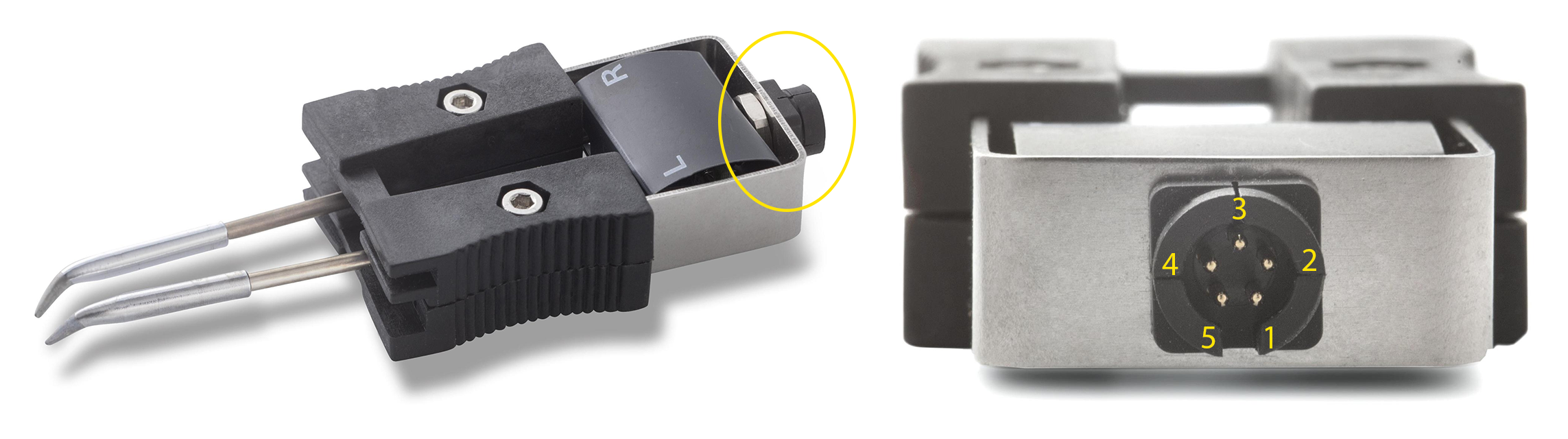
08/08/2023 at 04:53 • 0 commentsWeller RTW tweezer tips seem to mate with the handle through a 5-pin connector from Binder.
![]()
A bit of reverse engineering gives us the following pinout:
- right heater,
- right thermocouple,
- ground,
- left thermocouple,
- left heater.
As with regular RT tips, the thermocouple shares one pin with ground.
Solder Ninja Tweezers
USB-Powered Soldering Tweezers compatible with Weller RTW Tips