 Artur Majtczak
Artur MajtczakStory
I've always enjoyed building with Lego bricks, but rather than following the provided instructions, I preferred bringing my own ideas to life. Recently, I've delved into the world of Raspberry Pi, appreciating its capabilities, as well as being aware of its limitations. For projects involving moving components, I used to connect servos to the Raspberry Pi. However, as we all know, servos have their downsides – they're noisy, imprecise, and prone to malfunction.
Lately, I've been working on an open-source PCB project called SaraKIT. This innovative board allows us to control BLDC Gimbal Motors with remarkable precision, achieving fractional angle control, silence, and impressive power. With a collection of Lego bricks left from my previous endeavors, I've always dreamt of building an ultra-quiet and incredibly fast vehicle, one that could be effortlessly maneuvered via phone or computer using simple instructions. Of course, it's entirely possible to incorporate a camera, object recognition, line tracking, or whatever creative idea strikes you.
(As a matter of fact, I've also wanted to construct a second vehicle – a self-balancing one – which I've already built and will detail in a separate project.)
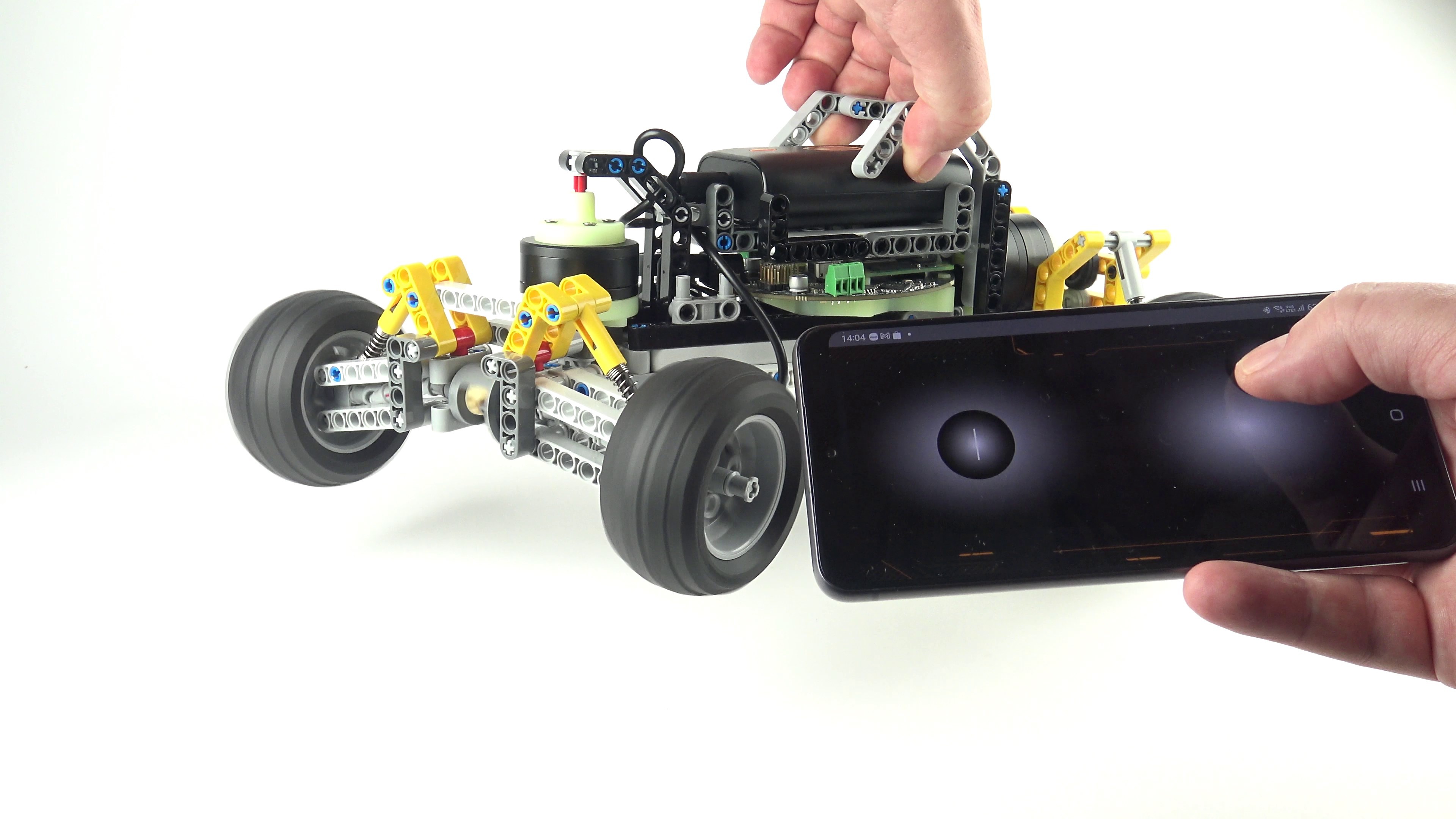
Below, I'll describe the first of these projects – a sleek, fast, and silent Lego car, featuring highly precise, independent 4-wheel drive with two differentials (though you're welcome to implement simpler suspension systems):
(from 1:30 you can see the car driving)
We can adjust the speed and power of the car by changing the arrangement of gears at the rear of the vehicle.

We control it using a smartphone or a computer; sample software in C++, Python and Delphi will be available in our GitHub repository.
We utilize two precise BLDC Gimbal motors. One is used for steering control, and the other serves as a four-wheel drive.

SaraKIT, which it is built on, is an open-source solution.

The car is powered by a power bank. For mobile devices, we recommend a simple connection to the PowerBank (PD2.0 PD3.0 Fast Charging and QC4 with USB-C output) with a special PD 12v cable. Or by connecting a USB cable via USB-C Pd Trigger Module Pd 12v.
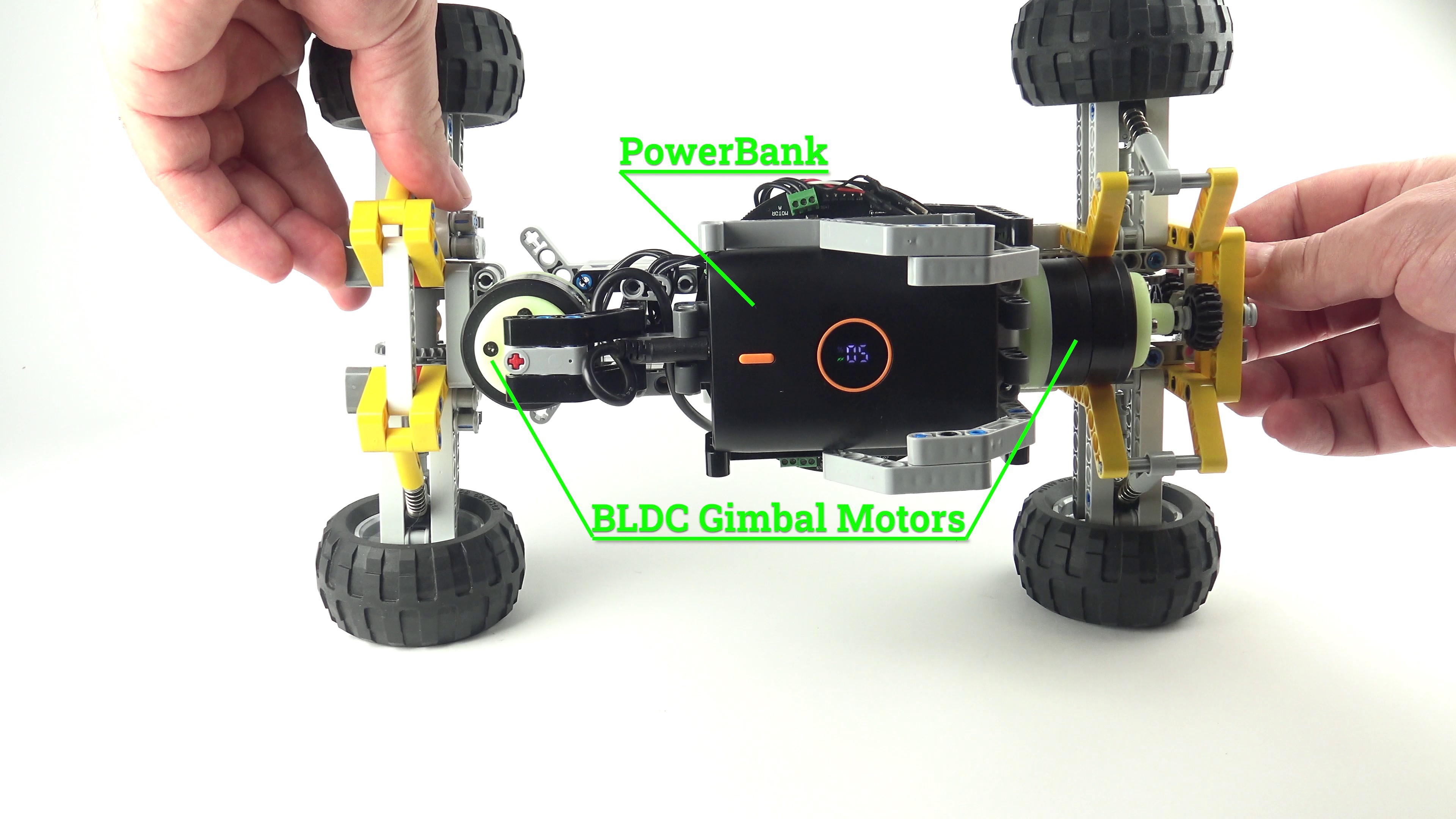
Two gimbals model GM3506 were used, 4-wheel drive independently, through two differentials, but you can do it simpler of course.
Sample code for motor control:
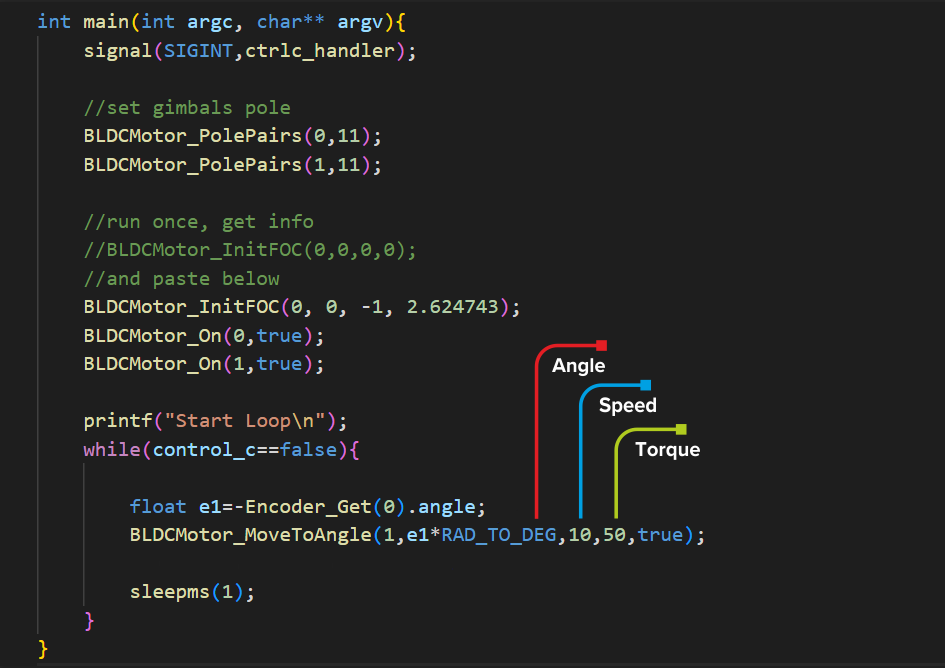
Examples:
https://github.com/SaraEye/SaraKIT-BLDC-gimbal-motors-FOC-Raspberry-Pi-64bit
https://github.com/SaraEye/SaraKIT-AS5048A-AS5600-encoder-Raspberry-Pi
Raspberry Pi and BLDC Gimbal Motors Project:
https://hackaday.io/project/192444-raspberry-pi-and-bldc-gimbal-motor
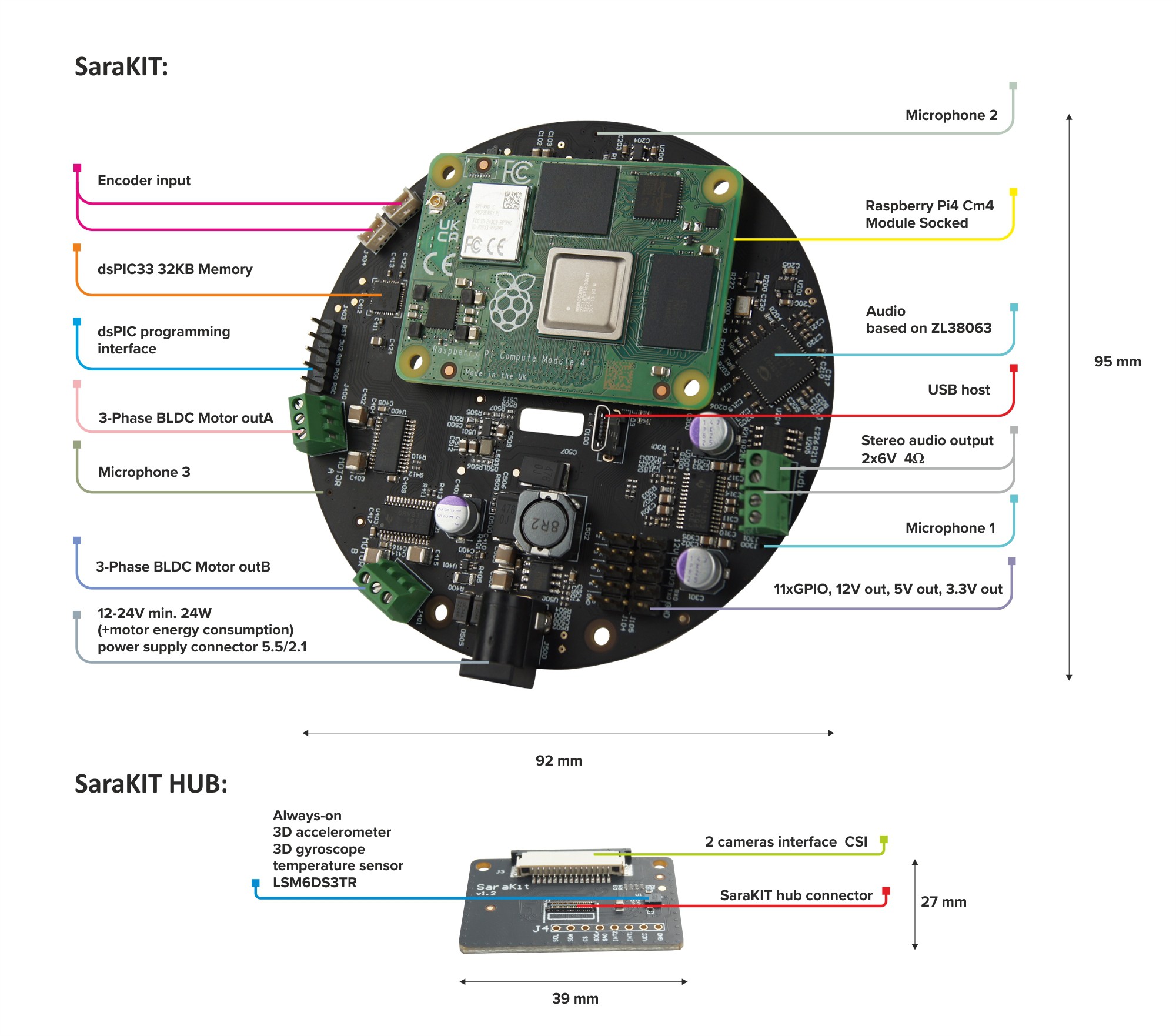
SaraKIT is Open Source Project a Raspberry Pi CM4 expansion board that enables advanced voice control and precise motor control. It features three sensitive microphones with sound localization for voice recognition up to 5 m away, two independent BLDC motor controllers providing quiet, fast and precise control for gimbal motors, a CSI interface with two cameras on a flexible cable, two accelerometers, a gyroscope, and a temperature sensor.
Launching Soon on Crowd Supply
Your project with SaraKIT and the Lego car is absolutely fascinating! Your innovative approach to controlling BLDC Gimbal Motors for a Lego vehicle is a testament to your creativity and technical prowess. It's clear that you've harnessed the power of Raspberry Pi and SaraKIT to create something remarkable.
The level of precision you've achieved in controlling the Lego car's movements, coupled with the option to easily adjust its speed and power, is truly impressive. The fact that you provide sample software in various programming languages on GitHub makes it even more accessible for others to replicate and build upon your work.
The incorporation of two precise BLDC Gimbal motors, one for steering control and the other for four-wheel drive, adds a layer of sophistication to this project. And the open-source nature of SaraKIT makes it a valuable resource for the community.
I'm also excited to hear about your self-balancing vehicle project, and I look forward to reading about it in your separate project documentation.
Thank you for sharing your work and contributing to the Hackaday community. Your dedication to pushing the boundaries of technology and your willingness to provide detailed documentation and code samples are truly commendable. Keep up the fantastic work! 🚗🔌🤖
https://pickleballassociationofontario.org