 BastelBaus
BastelBausI did some calibration measurements by rotating the knob only in one direction and doing a principal component analysis just using the first component for each of the measurements as a projection matrix
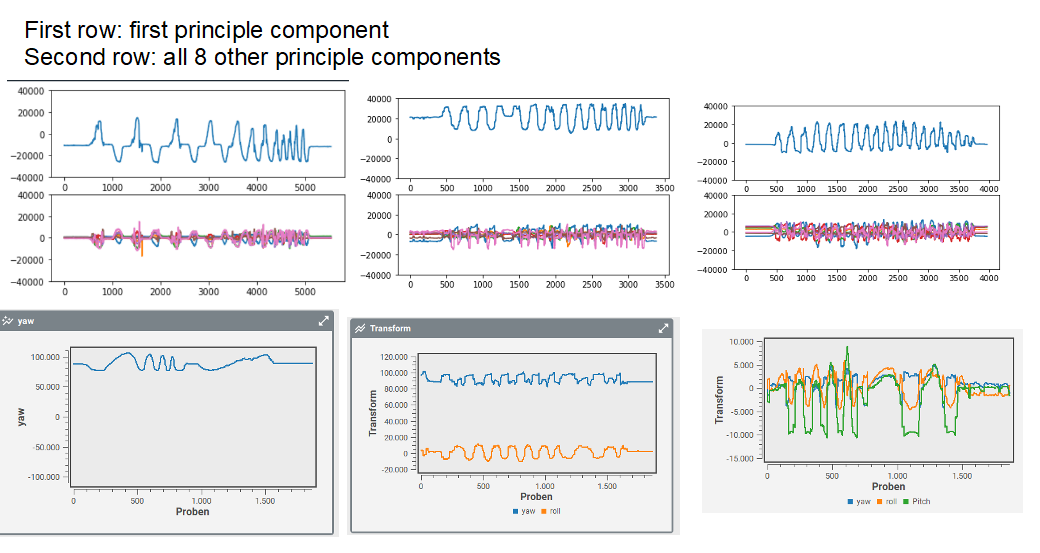 Not directly visible but I can tell you the first component (yaw) worked very nice. The plot was highly correlated to my movement of the know. When the other come in play, I recognized that there was a lot of cross talk. Then I recognized that the signal change when I move the whole know around the space ... oh yes earth magnetic field .... damn ... I plotet the raw signals from the simulation and recognized that the signals had also been in the range of the earth magnetic field (about 0.05mT):
Not directly visible but I can tell you the first component (yaw) worked very nice. The plot was highly correlated to my movement of the know. When the other come in play, I recognized that there was a lot of cross talk. Then I recognized that the signal change when I move the whole know around the space ... oh yes earth magnetic field .... damn ... I plotet the raw signals from the simulation and recognized that the signals had also been in the range of the earth magnetic field (about 0.05mT):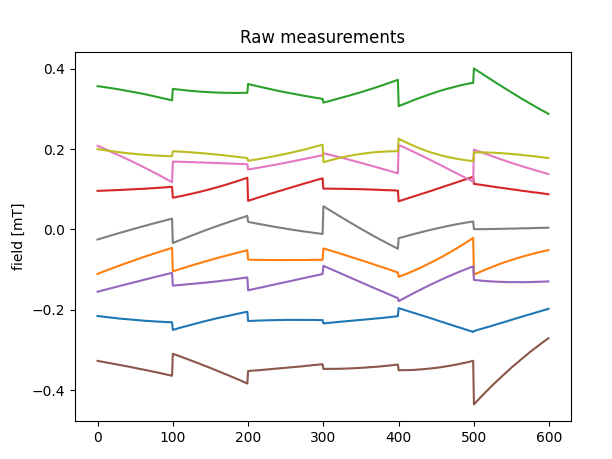
So how to solve it, in principle I have 9 measurements and 9 degrees of freedom (3 rotation and 3 displacements of the know respectively and 3 of the magnetic field). OK, since my sensors are not on the same position, one could argue that I even have 6 degrees of freedom of the whole device in space. How to continue:
- doing a highpass filter to remove the earth magnetic field
- adding 3 degrees of freedom to my calibration
- moving the magnets more closer that the induced field is much stronger than the earth field
- ...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.