The first thing we did today was to start a print for a much stronger (12hours time to print) gear and rack), we just stole it from here since we don't have the luxury of waiting for yet another not useful print.
https://www.thingiverse.com/thing:4666006/apps
Since we probably won't be using the scissor lift anymore and just rely on the spring and gaz, a very heavy duty rack will be fit and won't interfere with the clearance necessary for the scissor lift.
Using information from this tutorial, we were able to finalise the remote control part of the skate, initial scope included "movement at random" but that's a bad idea overall, mostly because once you have a good laugh you just have something that will just ram very fast into wall.
https://dronebotworkshop.com/radio-control-arduino-car/
Our ESC was made for a drone, and doesn't have reverse control, so it can only go forward.
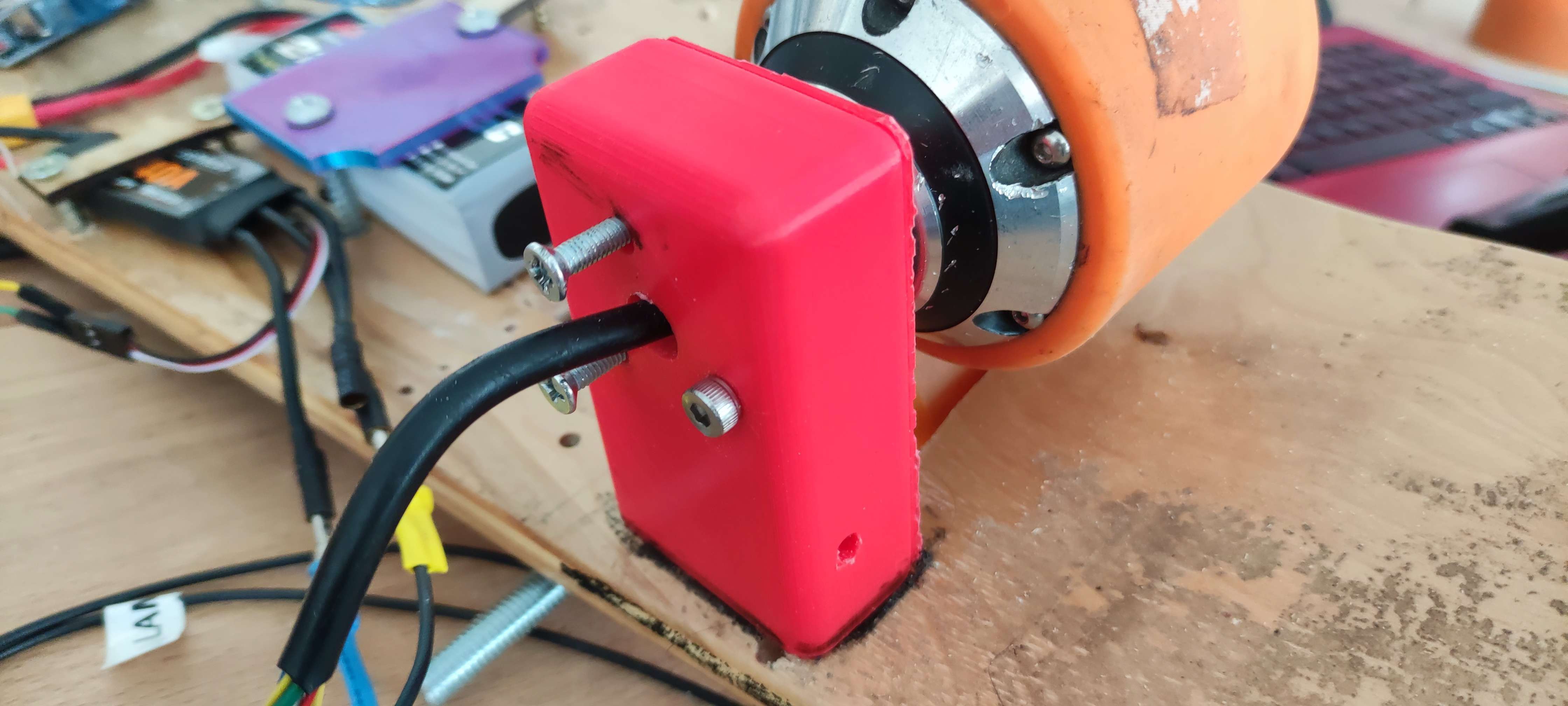
We then replaced the makeshift motor-wheel holder with the sturdy and perfectly size one we printed last time as showed here.
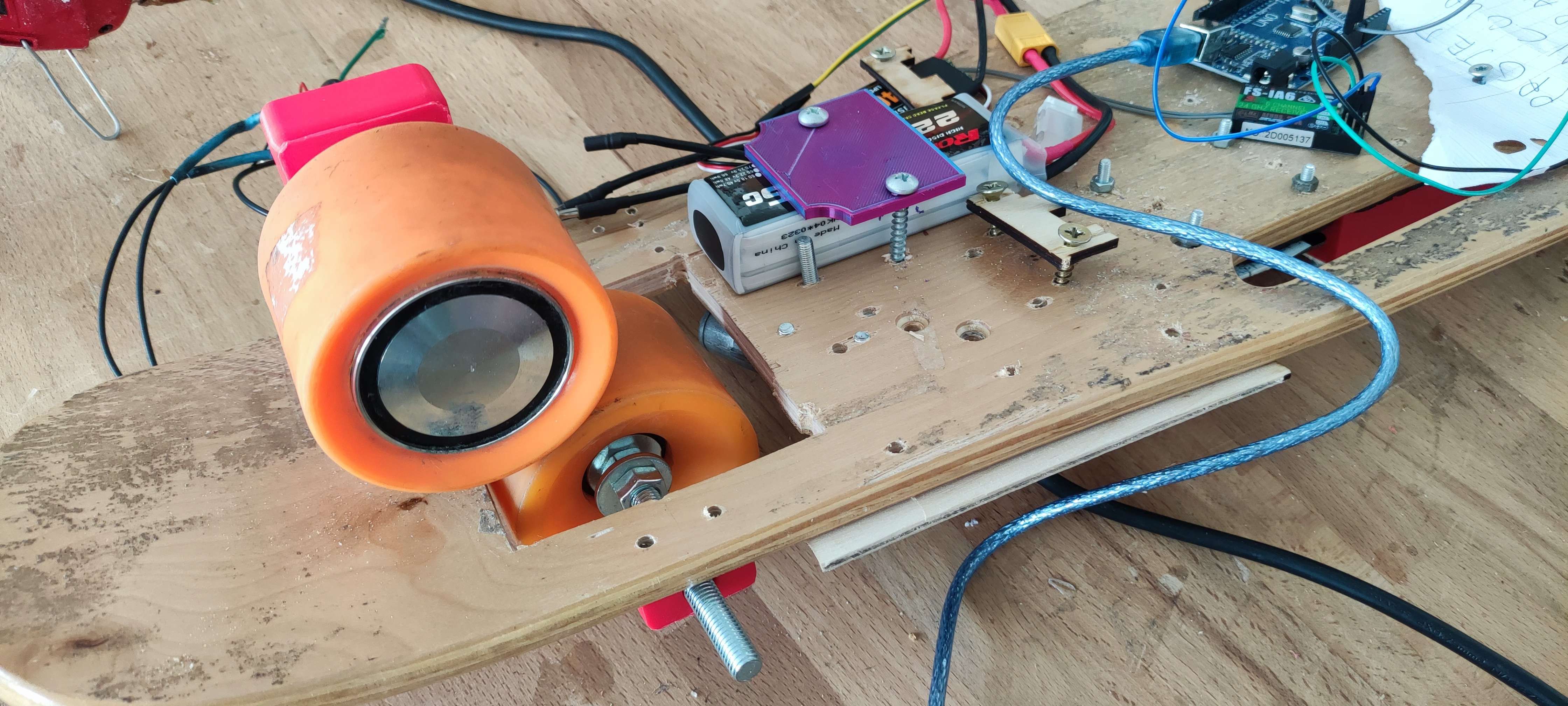
We also tested it to make sure the whole skate can move when powered, and it work seamlessly.
We also started working on the spring part, and started by removing excess mass that is supposed to connect to the bike, but since this is not a bike, flat surface would suit us better.
We had to made sure both end were flat, otherwise the spring would bend on one side.


The spring holder will probably be a circular casing, allowing us to compress it with vices then secure it with some kind of spring. We will need a quick release system for it to be efficient. Details will be discussed at a later date.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.