 Hans Jørgen Grimstad
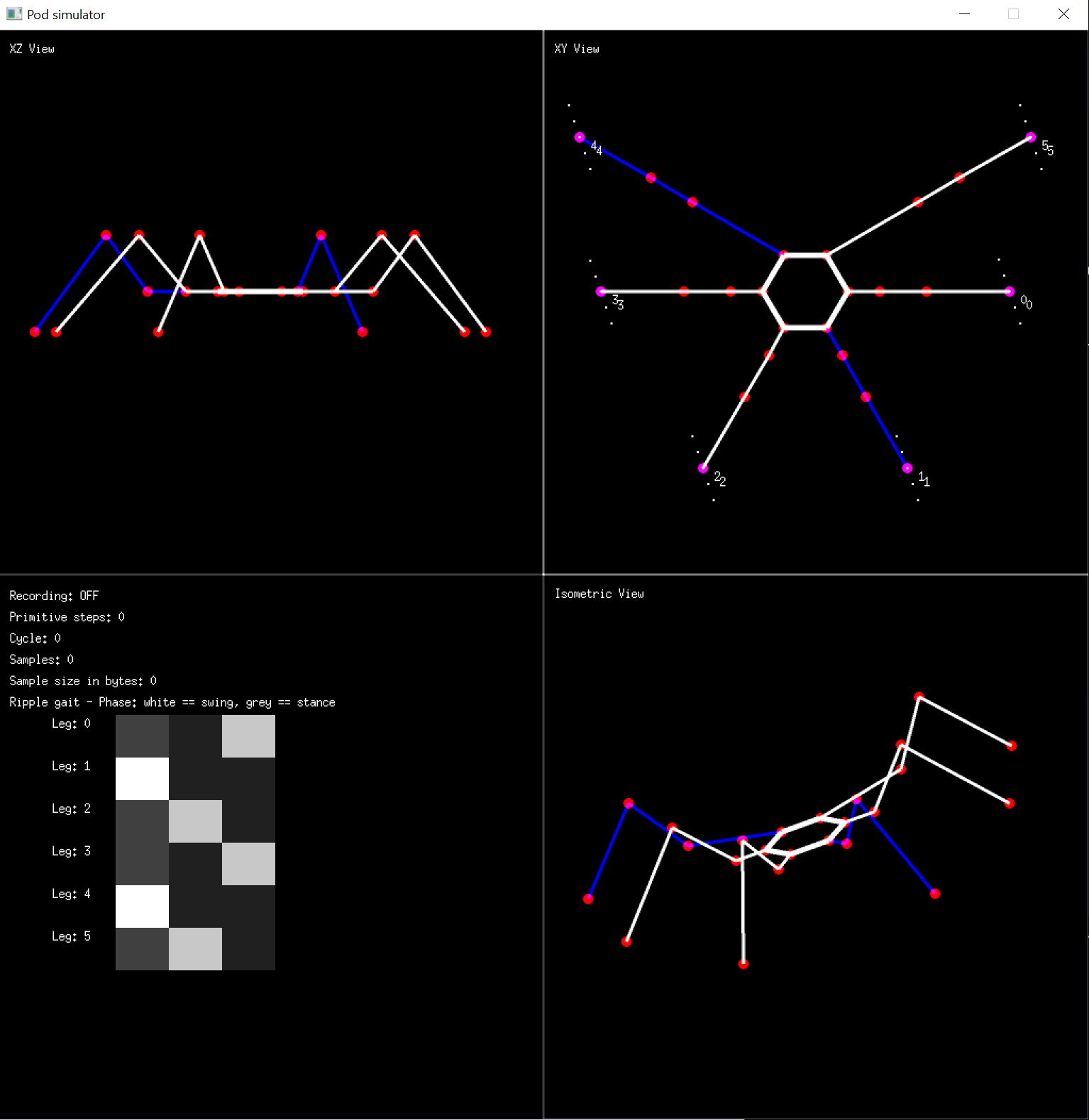
Hans Jørgen GrimstadOriginally, I was aiming for a pure hexapod simulator, but as the code matured, I realized that it was trivial to add support for pods with a different number of legs. (e.g. pentapods, heptapods and octopods etc). Since the kinematics is generic, adding support for other pods turned out to be trivial, but the choice of gait patterns are restricted for certain N number and legs. (Hexapods can choose between tripod, wave and ripple gaits, but trying to implement something other than wave gait for a heptapod made my head hurt)
I chose golang, since the language compiles on both mac, windows and raspberry pi. The idea was to first run the simulator with the GUI to verify the kinematics on a computer, and then run more or less the same code in "controller" mode on a raspberry pi (as a controller board for the robot).
Another possibility is to run the controller/kinematics code on a computer and then stream the servo parameters to a simpler ESP32 based board over the network. This also enables easy integration with external sensors in the room, as well as making it possible to orchestrate the movements of several robots at the same time.
As soon as the project is finished, i.e. I have wandering hexapods in the mancave, I'll opensource the code and design files on github.









 The Big One
The Big One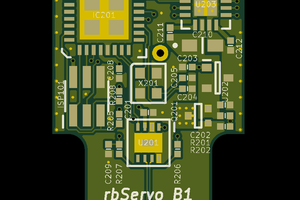
 RasmusB
RasmusB
 deʃhipu
deʃhipu
Playing at Just Casino in Australia has been a fantastic experience for me. The game selection is vast, and I can always find something new to try, which keeps things fresh and exciting. The site is well-designed and easy to navigate, making it perfect for Aussies like myself who want a hassle-free gaming experience. The bonuses have been generous, allowing me to extend my playtime and enjoy more games.