 Zaggo
ZaggoWhy I‘m doing this?
After many years of taking a break, I returned to my old hobby, "flight simulation," a few weeks ago. I found my over 20-year-old yoke and rudder pedals from CH Products in the basement and renewed my license for the latest version of X-Plane. After a few test flights, I noticed again what had always bothered me about flying with flight simulators: operating the flight instruments with a mouse on the screen.
Especially in “stressful situations,” it is extremely annoying to hit tiny controls with the mouse. It not only breaks the immersion when you suddenly have to tilt and scroll the viewing angle on the screen to look at some instrument, but often the slightest misclick means that complete settings in the GPS or transponder are reset or end up in completely different settings.
This is particularly annoying when using real-time ATC (e.g., through VATSIM) in the flight simulator, because not only do you frequently receive external instructions for navigation or radio communication, but you also no longer have the option to simply press the "Pause" button without ruining the simulation for all involved controllers and other sim pilots.
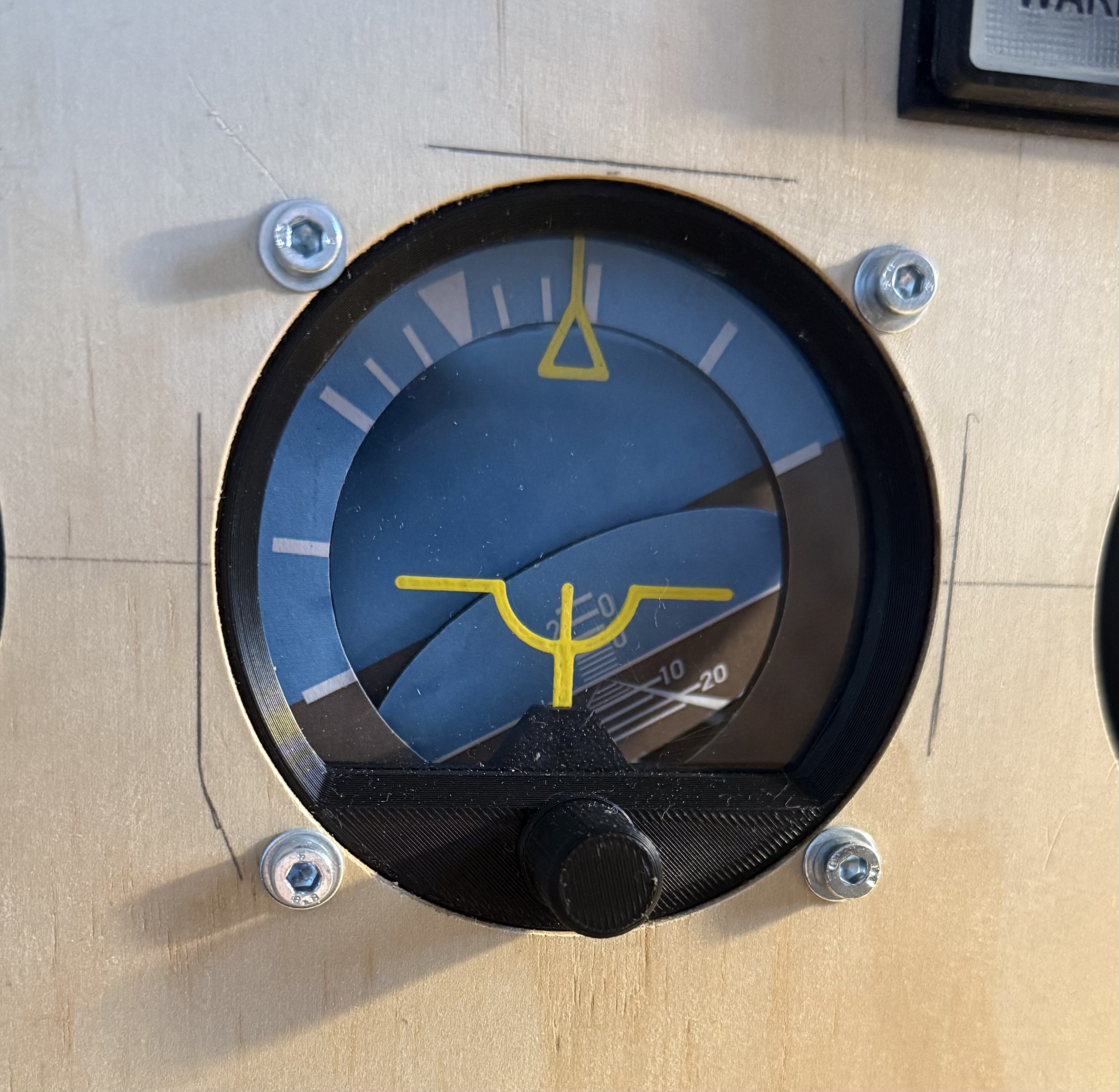
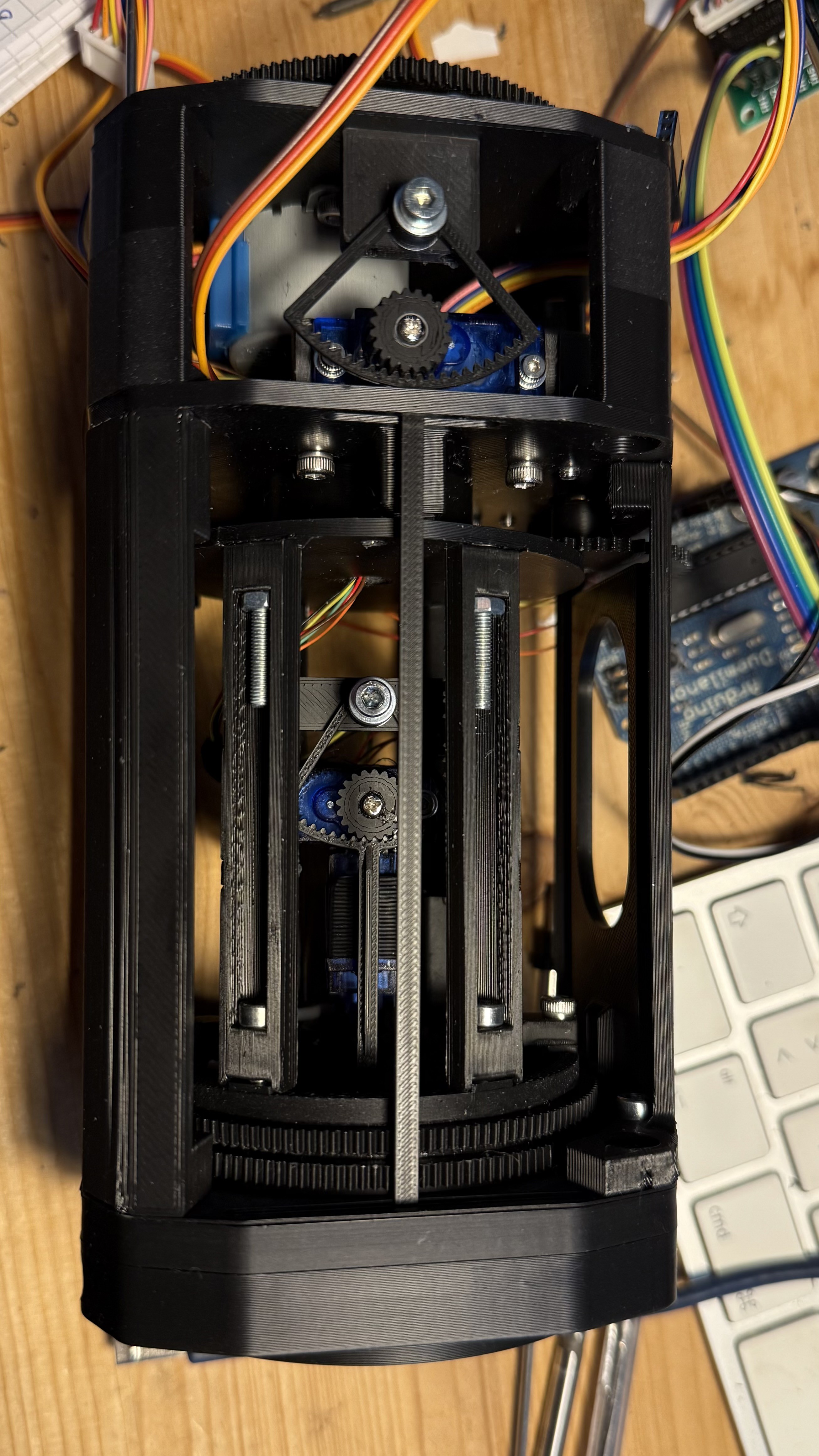
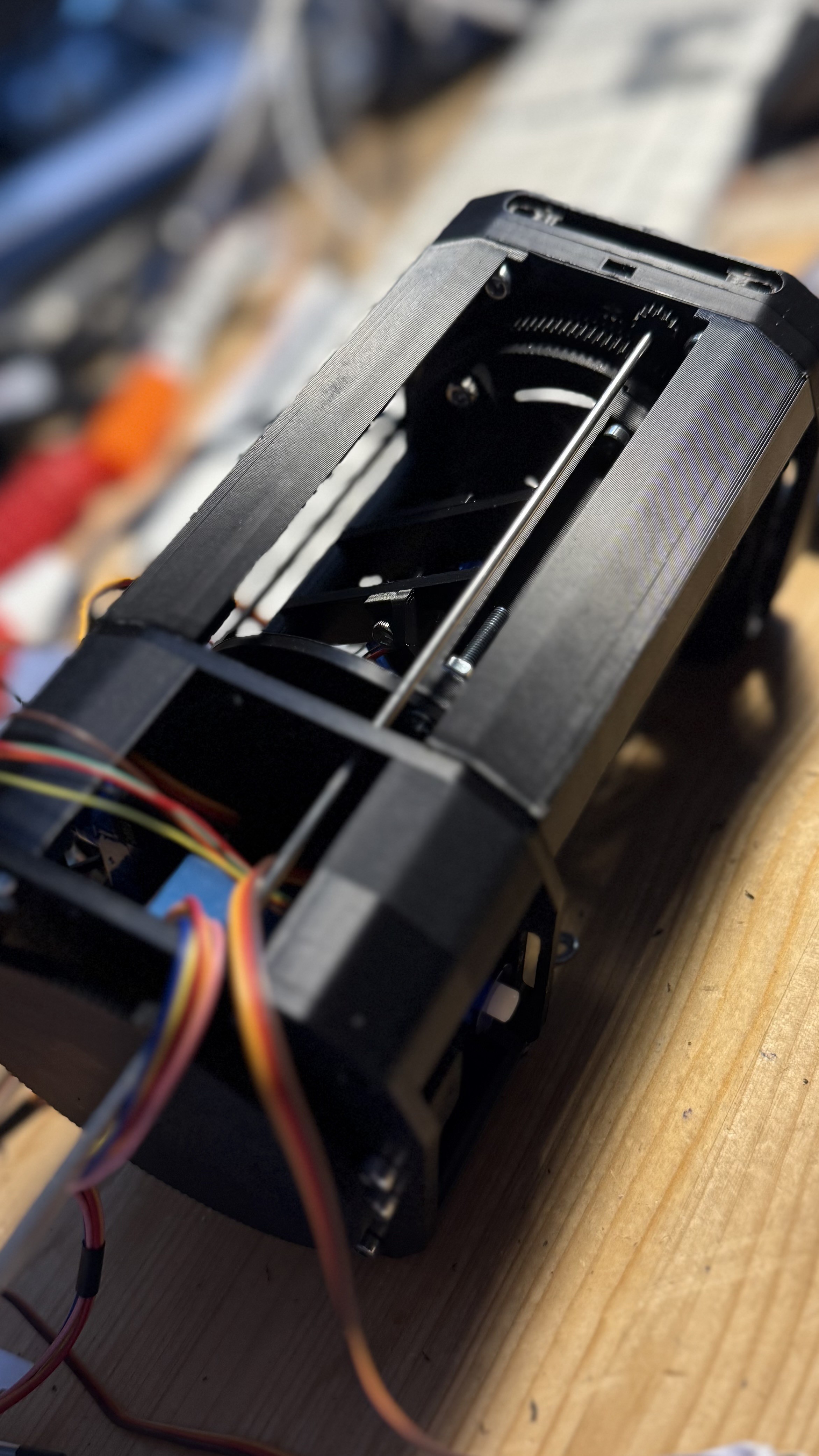
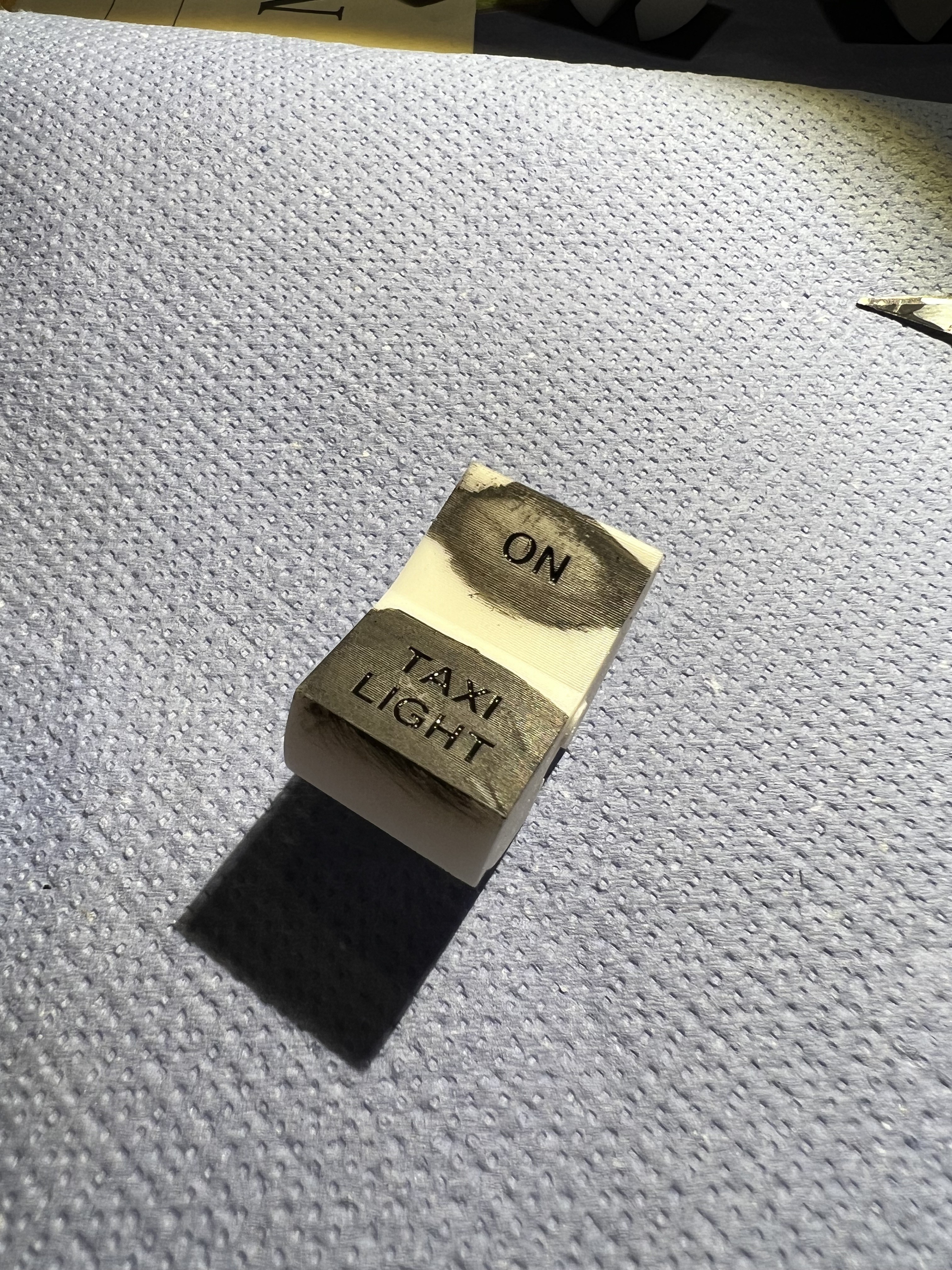
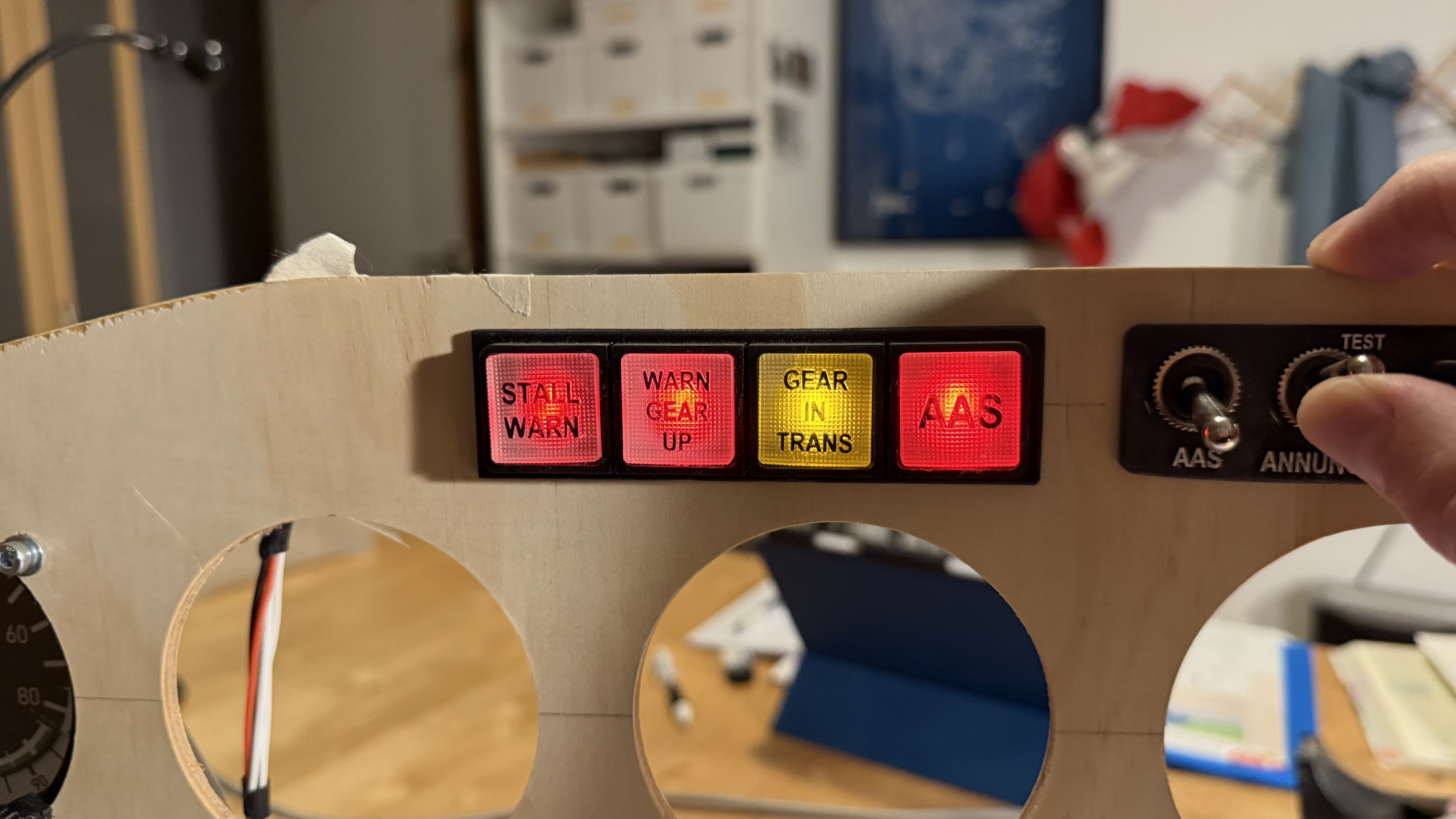
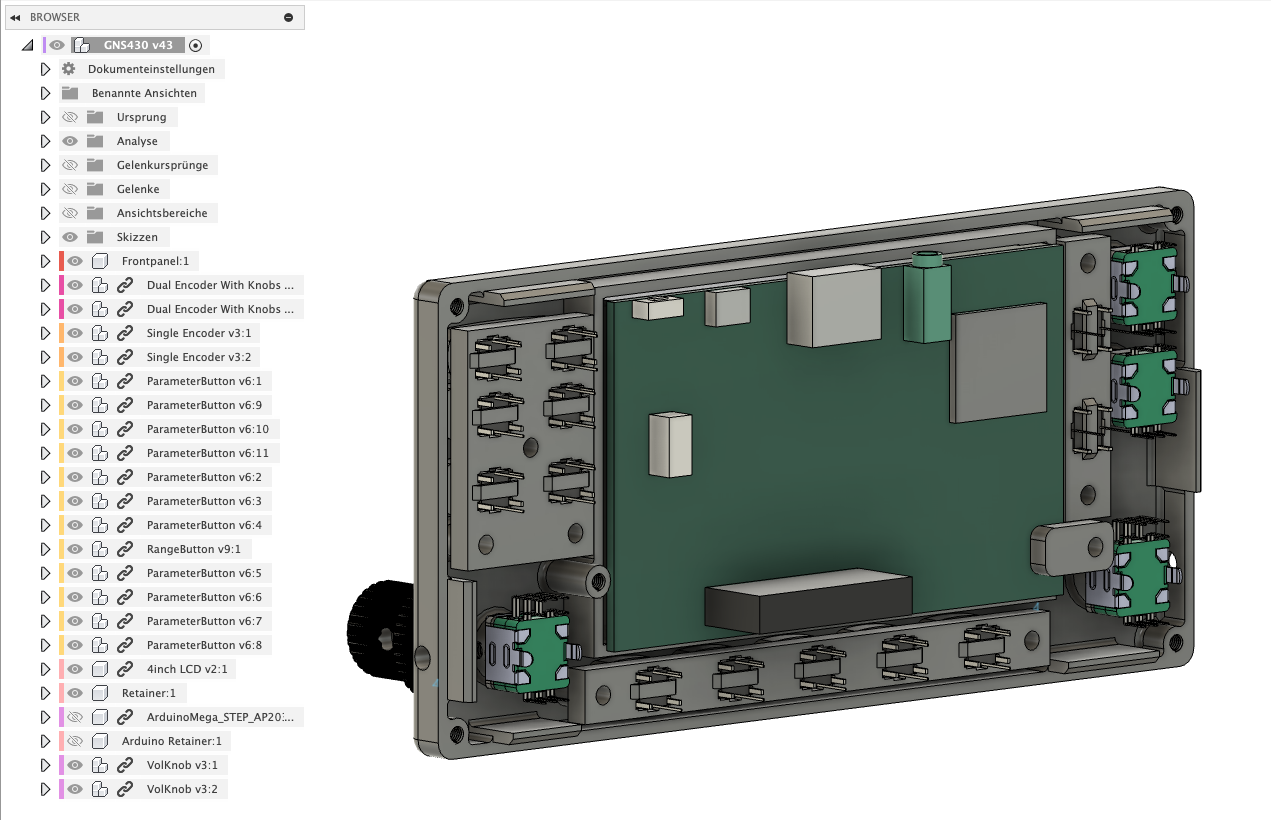
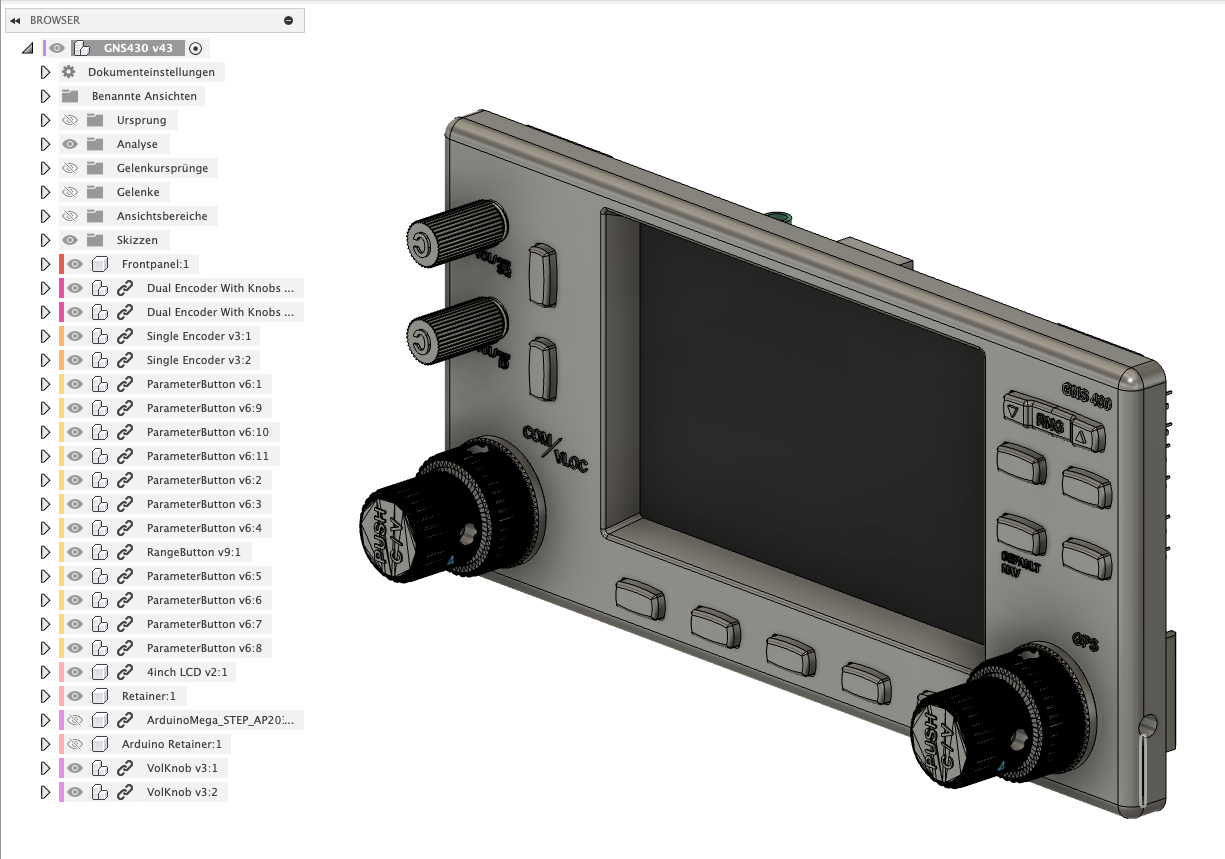
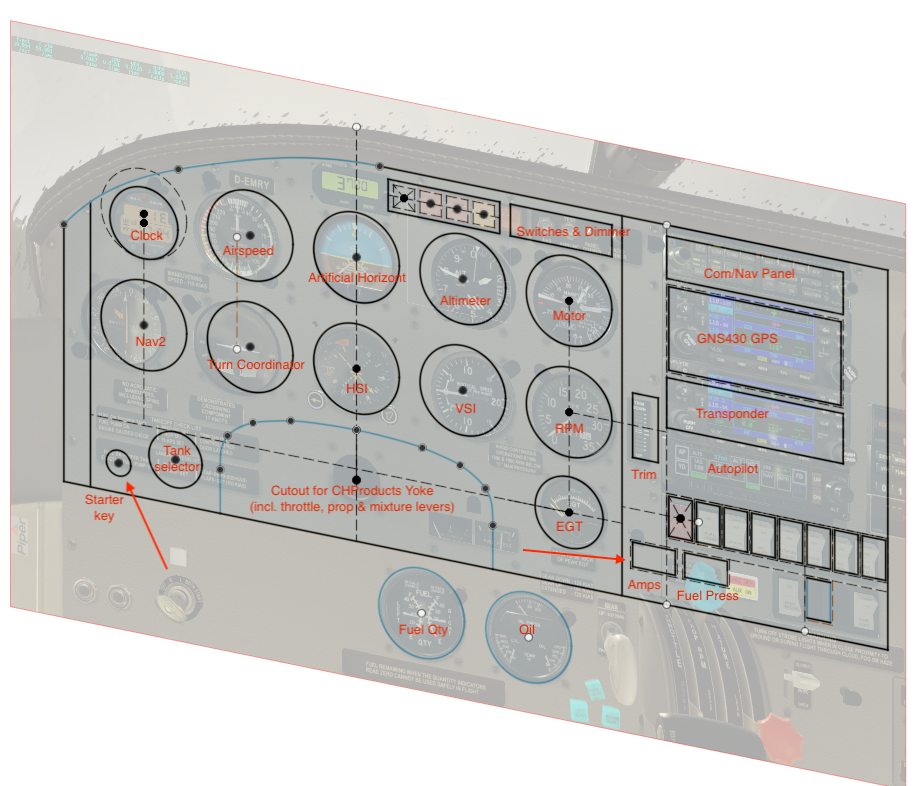
Therefore, my goal is to replicate the entire dashboard of a Piper Arrow III so that all instruments that function mechanically in the real airplane are also mechanically built in my dashboard. I'm not a fan of solutions where a monitor is simply placed behind a wooden board with appropriate cutouts. Of course, there are also "non-mechanical" devices in the cockpit, such as GPS. These will also have screens in my build, of course. Whether it's a mechanical or electronic instrument, the most important thing for me is that all the controls are mechanical. No virtual buttons or touchscreen elements.
















Another home cockpit project on Hackaday, awesome! ❤️
I started working on a ViperPit (TBA on Hackaday) after working on various button boxes for my Primary Buffer Panel before 👍