The main requirements for this project are listed below:
- The lightsaber should produce its characteristic buzzing or humming noise and modulate the buzzing noise as the lightsaber is moved or rotated.
- The lightsaber should be able to play sound effects from a memory chip, for example, when the blade is turned on or when the lightsaber collides with something.
- The lightsaber should be battery-powered and should be entirely self contained. This means that the electronics and batteries must fit inside the handle of the lightsaber.
- The project must not be too expensive. Ideally, the electronics should cost around 10 dollars per person, since the total cost will also include the LEDs, the tube for the blade, the handle, and the batteries.
- The project should be simple enough to be completed by kids of various ages in six 1.5-2 hour meetings. However, there must also be enough time to build the body of the lightsaber and assemble the parts, so the electronics will be limited to maybe three or four meetings. This means that the electronics may not involve any surface mount components.
- The project should involve some Arduino programming. However, since the kids will not be able to understand assembly code or register manipulation, all of these features must be hidden in an Arduino library.
With these requirements in mind, I began to design the electronics. First, I considered using just an Arduino Nano to implement all of the features. The Nano would write audio data to a DAC, which would feed into an amplifier. However, this would mean that the Nano must be able to continuously write to the DAC 44100 times per second while also controlling the LED strip and reading from the memory chip and accelerometer. All of these steps would have to be implemented very carefully to allow them to all fit in the allowed time, which would require a lot of assembly programming and would not leave much free time for user code.
To fix these issues, I split up these tasks between two processors: an Arduino Nano for reading from the accelerometer and controlling the LEDs, and an ATtiny85 for generating all of the sound effects and writing to the DAC. The Nano then sends commands to the ATtiny to control the volume of the buzzing, start playback, and control the volume of the playback. I also reduced the sample rate of the audio from 44100Hz to 33333Hz, which gives me 32% more time per sample.
This "dual-core" structure offloads the majority of the timing-critical work onto the ATtiny, which can then be programmed in assembly. The Nano can then be programmed mostly using Arduino code, with only a little assembly hidden away in a library.
The audio amplifier also presented a number of challenges. The speaker must be small enough to fit inside the handle, but loud enough to generate a sound that is audible a few meters away. The club leader had ordered a small (~3cm diameter) 3 watt speaker for testing. To maximize the loudness of the sound that the speaker could produce, I used a full-bridge driver, which drives both terminals of the speaker, but with inverted signals. Thus, the voltage across the speaker is twice the amplitude of the input signal, and the produced sound is twice as loud.
Since the buzzing sound can be varied as the lightsaber is moved, it would be impractical to use and store a clip of original lightsaber audio. Thus, I simplified the buzzing sound so that it consists of a 25-millisecond clip that is played on repeat continuously. This clip is stored in the program memory of the ATtiny. At the chosen sample rate, the clip consists of 833 samples. A plot of the waveform is shown below:

The specific design of the buzzing sound will likely be modified later in the project.
The DAC used in this project will be an MCP4911 10-bit DAC, and the memory chip will be an SST25VF080B 8 megabit SPI flash chip. This chip was one of the few through-hole flash chips I could find on Digikey, and should be enough to store around 30 seconds...
Read more »
 Orlando Hoilett
Orlando Hoilett
 Simon Merrett
Simon Merrett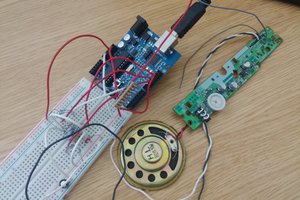
 adria.junyent-ferre
adria.junyent-ferre
 AndyMac
AndyMac